基本原理
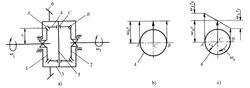 圖1 差速器差速原理
圖1 差速器差速原理 從運動學的觀點來看,對稱式圓錐齒輪差速器在本質上是一種行星齒輪機構,其差速原理如圖1所示。
從圖1可知:差速器殼3與行星齒輪軸5連成一體,形成行星架,因為它又與主減速器的從動齒輪6固連在一起,故為主動件,設其角速度為ω;半軸齒輪1和2為從動件,其角速度分別為ω和ω。A、B兩點分別為行星齒輪4與半軸齒輪1和2的嚙合點,C為行星齒輪的中心點,A、B、C三點到差速器旋轉軸線的距離均為r。
原理推導
當行星齒輪僅隨同行星架繞差速器旋轉軸線公轉時,顯然處在同一半徑r上的A、B、C三點的圓周速度都相等(圖1b),其值為ωr。於是ω=ω=ω,即差速器不起差速作用,而半軸角速度等於差速器殼3的角速度。
由此還可得知:
①當任一側半軸齒輪轉速為零時,另一側半軸齒輪的轉速為差速器殼轉速兩倍;
②當差速器殼轉速為零(例如用中央制動器制動萬向傳動軸時),若一側半軸齒輪受其他外來力矩而轉動,則另一側半軸齒輪即以相同轉速反向轉動。
