
介紹
所有的中心輪均能繞軸線轉動的“行星輪系”。用來把一個軸的轉動分配到兩個軸上,或把兩個軸的轉動合為一個軸的轉動。如汽車後輪的分速裝置便是一個差動輪系。
結構組成
 基本構件
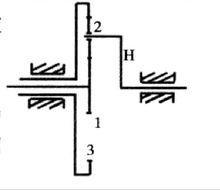
基本構件1、中心輪:在周轉輪系運轉過程中,繞固定軸線迴轉的齒輪,稱為中心輪,又稱太陽輪,如圖中的齒輪1和齒輪3。
2、行星輪:既繞自己的軸線作自轉,又繞中心輪的軸線作公轉的齒輪,稱為行星輪,如圖中的齒輪2。
3、系桿:帶動行星輪作公轉的構件,稱為系桿,又稱行星架或轉臂,如圖中的構件H。
工作原理
 差動輪系工作原理
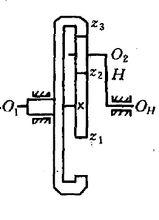
差動輪系工作原理如圖所示,差動輪系由齒輪1、齒輪2和內齒輪3所組成的。系桿H能轉動,即齒輪2的軸線O能繞OO軸線轉動。因為它有一根能旋轉的系桿,齒輪1和齒輪3 都能把運動傳給齒輪2 及系桿,無論齒輪1和齒輪3 的轉速和轉向怎么變化,都不會產生打壞齒輪的問題。齒輪2 不僅能自轉,而且可以隨著系桿轉動而公轉,從而能適應齒輪1、齒輪3 轉速與轉向的任意變化。這就是說,差動輪系能傳遞兩個轉動,實現轉動的合成和分解。
特點
具有體積小,重量輕,傳動比範圍大,效率高(需型式選用得當)和工作平穩等優點,同時差動輪系還可以用於速度的合成與分解或用於變速傳動,所以套用日益廣泛。但缺點是結構較複雜,製造精度要求較高,製造安裝較困難。在實際套用上,有的輪系既包含定軸輪系,又包含行星傳動,則形成了混合輪系。
分類
 三種輪系
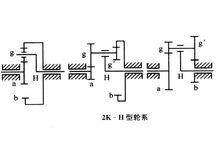
三種輪系常根據其中構件的組成情況分為:2K-H 型、3K 型和K-H-V 型等,其中K 代表中心輪,H 代表行星架,V 代表輸出構件。
2K-H 型:如圖1 所示,輪系中有兩個中心輪。
3K 型:如圖2所示,輪系中有3個行星輪,行星架只是起支撐行星輪的作用。
K-H-V型:如圖3 所示,其運動是通過等速機構由V軸輸出。
套用
 汽車差速器
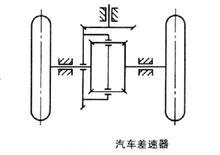
汽車差速器差動輪系有兩個自由度,當給定三個基本構件中任意兩第三個基本構件的個的運動後,第三個基本構件的運動才能確定。這就是說,運動為另兩個基本構件的運動的合成,或者將一個基本構件的運動按照可變的比例分解為另兩個基本構件的運動。即差動輪系可用作運動的合成與分解。運動的分解就是將一個構件的轉動,按工作要求分解為兩個構件的轉動。如圖所示的汽車差速器,在汽車轉彎時將汽車傳動軸的輸人轉速分解為兩個後車輪的不同轉速。
自由度
差動輪系具有兩個或兩個以上自由度的輪系,是由兩個或兩個以上的原動件決定了輪系中執行件的確定運動,執行件可以為齒輪或系桿。但一般的差動輪系的自由度為2,亦即只需要2個原動件整個輪系就具有確定的運動。
與行星輪系
行星輪系和差動輪系統稱為周轉輪系(一個周轉輪系由三類構件組成:一個系桿、一個或幾個行星輪和一個或幾個與行星輪相嚙合的中心輪)。
行星輪系中,兩個中心輪有一個固定;差動輪系中,兩個中心輪都可以動。當一個中心輪的輸入速度為零,差動輪系變為行星輪系。行星輪傳動比跟普通齒輪算法是一樣的,差動輪則類似諧波齒輪,一般是被驅動輪/差動齒數=傳動比。或者說是由兩個或兩個以上的原動件決定了輪系中執行件的確定運動,執行件可以為齒輪或系桿。但一般的差動輪系的自由度為2,亦即只需要2個原動件整個輪系就具有確定的運動。
