圖像匹配製導系統
正文
利用目標及其周圍環境的景物特性或輻射特性引導飛行器的制導系統。飛行器上的探測器感受目標周圍的景物、圖像或飛向目標沿途的景物特徵,並將收集到的數據(或圖像)與預先存儲在飛行器記憶裝置中的基準數據(或圖像)比較,根據比較結果確定飛行器相對於目標的位置,產生控制飛行器的指令,消除飛行偏差。圖像匹配製導系統分為地形匹配、雷達區域相關和微波輻射區域相關三種類型。地形匹配系統
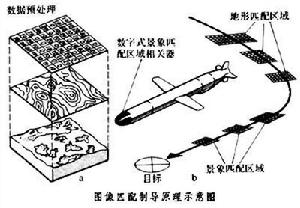 又稱地形輔助導航系統。它以地形輪廓線(等高線)為匹配特徵,在飛行器預定航跡所經過的地區選擇若干區配區,繪製成很多長方形的地圖(例如寬2公里、長10公里的圖),再將其分隔成許多小方塊(100×100米2),在各個小方塊內,預先測出該地區的平均標高,就得到以標高為特徵的數字地圖(圖a),將其存儲在飛行器計算機內作為參考圖。飛行時,飛行器上的俯視雷達高度表實時地測出航跡經過匹配地區的高度,並與參考圖相比較,即可確定飛行器實際航跡對預定航跡的偏差。圖a表示利用地形高度特徵製作數字參考地圖的方法,圖b表示飛行器航跡經過匹配區域的匹配情況。
又稱地形輔助導航系統。它以地形輪廓線(等高線)為匹配特徵,在飛行器預定航跡所經過的地區選擇若干區配區,繪製成很多長方形的地圖(例如寬2公里、長10公里的圖),再將其分隔成許多小方塊(100×100米2),在各個小方塊內,預先測出該地區的平均標高,就得到以標高為特徵的數字地圖(圖a),將其存儲在飛行器計算機內作為參考圖。飛行時,飛行器上的俯視雷達高度表實時地測出航跡經過匹配地區的高度,並與參考圖相比較,即可確定飛行器實際航跡對預定航跡的偏差。圖a表示利用地形高度特徵製作數字參考地圖的方法,圖b表示飛行器航跡經過匹配區域的匹配情況。 地形匹配系統是全天候的導航系統,由於它輻射的信號是垂直向下的,飛行器能很快地飛過任何地面干擾機的有效作用範圍,抗干擾能力較強。這種系統適用於起伏不平的丘陵和山嶽地帶,但不適用於海上、沙漠和草原地區。
雷達區域相關係統 用相關管把預先拍攝的偵察照片處理成電信號並存儲在相關管內。飛行時,外部景像通過光學設備投射到相關管的陰極上,將光電陰極發射的反映真實外景的圖像與存儲在網屏上的偵察圖像相比較,然後由電子倍增器中的感測器輸出反映真實外景與存儲圖像相關程度的信號,並用它作為控制飛行器的誤差信號。美國的“潘興”Ⅱ飛彈即利用雷達區域相關係統,當彈頭再入到15250米高度後雷達開機,天線繞垂直穩定軸掃描,其掃描頻率為2赫,其中1/2秒用於地形測繪和存儲,1/2秒用於高度測量。
微波輻射區域相關係統 利用目標及其周圍環境微波反射率之差進行工作,將微波輻射計或紅外探測器探測的信息與可見光譜部分繪製的地形圖數據相匹配。飛彈上裝紅外成像導引頭和跟蹤器,當紅外成像感測器測出目標位置時,計算機即計算出目標的近似邊界,將飛彈導引到目標的近似中心。
