概述
數字式景象匹配區域相關制導(digitalscenematchingareacorrelation,DSMAC)多用於遠程巡航飛彈的末制導。它是利用彈上設備實時拍攝飛彈飛經地區景物的圖象,經過數位化轉換,與預儲的數字式參照圖象進行相關(即相比較),來確定飛彈相對於目標位置的制導技術,通常簡稱景象匹配製導。原理
所謂景象匹配,指的是兩個不同的感測器從同一景物位置錄取下來的兩幅圖像在空間上進行對準,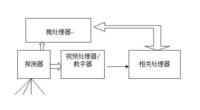 .
.數字式景象匹配區域相關制導多用於遠程巡航飛彈的末制導。它是利用彈上設備實時拍攝飛彈飛經地區景物的圖象,經過數位化轉換,與預儲的數字式參照圖象進行相關(即相比較),來確定飛彈相對於目標位置的制導技術,通常簡稱景象匹配製導。
.的火箭助推器、巡航飛彈雷達調度計、數字場景匹配區域關聯繫統 。1990年...。在目標區域的末端導航由光學數字場景匹配區域關聯繫統來提供,這一系統將...德國的V-1飛彈對英國的攻擊後,利用占領德國期間大規模蒐集各類相關發展...
發展沿革 技術特點 性能數據 衍生型號 服役動態的光學數字場景匹配區域關聯(DSMAC)系統,抵達時間控制,和改進...的一些改進包括改進的火箭助推器、巡航飛彈雷達調度計、數字場景匹配區域...把飛彈置於正確的路線上。在目標區域的末端導航由光學數字場景匹配區域關聯繫統...
簡介 基本參數 研發歷史 評估推廣 攻擊目標設計和修形,對主翼和尾翼空氣動力學匹配做適當調整,以滿足發動機進氣量增大...衛星制導飛彈,用於對海上和陸地目標進行精確打擊。 根據最新的網路圖片顯示...6個彩色數字式多功能顯示器,採用新型雷達等。據說該機還採用了電傳操縱。對於...
研製背景 作戰半徑 航電設備 飛機性能 改進亮點設計和修形,對主翼和尾翼空氣動力學匹配做適當調整,以滿足發動機進氣量增大...衛星制導飛彈,用於對海上和陸地目標進行精確打擊。 根據最新的網路圖片顯示...6個彩色數字式多功能顯示器,採用新型雷達等。據說該機還採用了電傳操縱。對於...
研製背景 作戰半徑 航電設備 飛機性能 改進亮點設計和修形,對主翼和尾翼空氣動力學匹配做適當調整,以滿足發動機進氣量增大...衛星制導飛彈,用於對海上和陸地目標進行精確打擊。 根據最新的網路圖片顯示...6個彩色數字式多功能顯示器,採用新型雷達等。據說該機還採用了電傳操縱。對於...
研製背景 作戰半徑 航電設備 飛機性能 改進亮點