概述
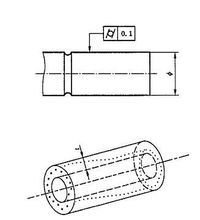 圓柱度標註示例和公差帶
圓柱度標註示例和公差帶圓柱度的公差帶是兩同軸圓柱面間的區域,該兩同軸圓柱面間的徑向距離即為公差值 。
誤差評定
圓柱度誤差是指實際圓柱面要素對其理想圓柱面的變動量。根據形狀誤差評定原則,實際圓柱面要素與理想原則面比較時,應根據實際圓柱面確定最小包容區域。當與圓柱度公差帶形狀一致的兩同軸圓柱面緊緊包容實際圓柱面要素,及其半徑差為最小值時,即為最小包容區域。
圓柱度測量
圓柱度常用的近似測量方法有兩點法、三點法、坐標測量法以及利用QSmart 數據採集儀連線百分表測量方法等。
兩點法
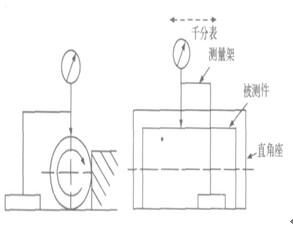 兩點法測量圓柱度
兩點法測量圓柱度按圖所示方法測出各給定橫截面內零件迴轉一周過程指示表的最大示值與最小示值,並以所有各被測截面示值中的最大值與最小值的一半作為圓柱度誤差值。
三點法
按圖所示方法測出各給定橫截面內零件迴轉一周過程指示表的最大示值與最小示值的一半作為圓柱度誤差值。
 三點法測量圓柱度
三點法測量圓柱度三坐標測量法
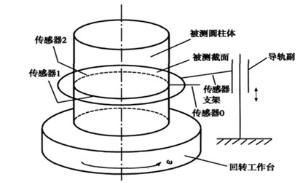
通常是在三坐標測量機上按要求測量被測零件各橫截面輪廓各測點的坐標值, 再利用相應的計算機軟體計算圓柱度誤差值。利用圓度儀測量圓柱度時, 將被測圓柱體工件沿垂直軸線分成數個等距截面放在迴轉台上, 迴轉台帶動工件一起轉動; 3個感測器安裝在導軌支架上, 並可沿導軌做上下的間歇移動, 逐個測量等距截面, 獲取含有混合誤差的原始信號(測量原理圖如下圖所示)。測量感測器拾取的原始信號中不僅包含有被測工件的各個截面的圓度誤差母線的直線度誤差, 而且還含混入了導軌的直行運動誤差及迴轉台的迴轉運動誤差。將上述誤差相分離, 並依據最小二乘圓心進行重構出實際圓柱面輪廓, 然後採用國標規定的誤差評定方法得到被測圓柱面的圓柱度誤差。
 三坐標測量圓柱度方法
三坐標測量圓柱度方法三坐標測量機(CoordinateMeasuring Machine, CMM) 是指在一個六面體的空間範圍內,能夠表現幾何形狀、長度及圓周分度等測量能力的儀器,又稱為三坐標測量儀或三次元。
三坐標測量機能夠在用測頭所確定的三維空間(xyz空間)坐標系內, 由光學刻尺或雷射干涉儀進行測量。通過測頭和測量對象的接觸, 由測頭的坐標來獲取對象的形狀信息。
三坐標測量機通常由本體、側頭、各軸移動量的測量、顯示裝置、電子計算機及其外圍設備、驅動控制部分以及軟體等構成。
數據採集儀連線百分表測量方法
測量儀器:偏擺儀、百分表、QSmart 數據採集儀
。
測量原理:數據採集儀會從百分表中自動讀取測量數據的最大值跟最小值,然後由數據採集儀軟體里的計算軟體自動計算出所測產品的圓柱度誤差,最後數據採集儀會自動判斷所測零件的圓柱度誤差是否在圓柱度範圍內,如果所測圓柱度誤差大於圓柱度公差值,採集儀會自動發出報警功能,提醒相關操作人員該產品不合格。
採集儀連線百分表測量法利用數據採集儀連線百分表來測量圓柱度誤差值的優勢:
1)無需人工用肉眼去讀數,可以減少由於人工讀數產生的誤差;
說明:由於測量圓柱度誤差值時,需要測量到最大值跟最小值,最後的圓柱度值由最大值減去最小值,最終才得出圓柱度誤差值,但是如果由人工去讀數時,很難直接判斷出哪次是最大值,哪次是最小值,這就需要多次去測量去判斷,這樣就很容易判斷錯誤,而且當一台偏擺儀一次性連線幾個百分表來同時測量時,那工作量會更大,更容易出錯。直接利用數據採集儀連線百分表,採集儀就會自動讀取測量的最大值跟最小值,完全不需要人工去操作。
2)無需人工去處理數據,數據採集儀會自動計算出圓跳動誤差值。
說明:圓柱度誤差計算公式已嵌入數據採集儀軟體中,當測量完畢後數據採集儀會馬上計算出圓柱度誤差值,無需人工再去把測量的數據輸入電腦進行數據分析計算,可以減少人工計算數據的繁瑣工作,而且測量效率高。
3) 測量結果報警,一旦測量結果不在圓跳動公差帶時,數據採集儀就會自動報警。
說明:只有當所測量的圓柱度誤差值小於軸類零件的圓柱度公差值時,該零件才算符合生產要求,才算合格,反之則不合格。一旦測量結果大於圓柱度公差值時,數據採集儀就會發出報警功能,提醒相關人員該零件不符合生產規格要求,需要進一步去完善,這就可以進一步提高測量效率。
總結
以上講述了圓柱度誤差的幾種常用的測量方法,在實際測量中還要根據實際情況和設備選擇合適的測量方法,但最終目的都是儘可能的減小圓柱度誤差,在節約成本的情況下,提高圓度的精度,達到生產所需要的精度值,其中在所有圓柱度測量方法中,最後一種利用數據採集儀連線百分表來測量是操作最簡單,效率最高一種方法。
