
結構原理
 四軸飛行器的原理
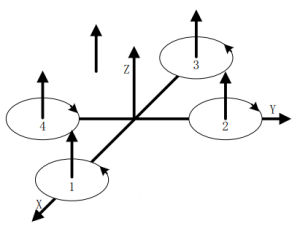
四軸飛行器的原理基本運動原理
垂直運動,俯仰運動,滾轉運動,偏航運動。垂直運動圖(a)中,因有兩對電機轉向相反,可以平衡其對機身的反扭矩,當同時增加四個電機的輸出功率,鏇翼轉速增加使得總的拉力增大,當總拉力足以克服整機的重量時,四鏇翼飛行器便離地垂直上升;反之,同時減小四個電機的輸出功率,四鏇翼飛行器則垂直下降,直至平衡落地,實現了沿z軸的垂直運動。當外界擾動量為零時,在鏇翼產生的升力等於飛行器的自重時,飛行器便保持懸停狀態。保證四個鏇翼轉速同步增加或減小是垂直運動的關鍵。俯仰運動圖(b)中,電機1的轉速上升,電機3的轉速下降,電機2、電機4的轉速保持不變。為了不因為鏇翼轉速的改變引起四鏇翼飛行器整體扭矩及總拉力改變,鏇翼1與鏇翼3轉速改變數的大小應相等。由於鏇翼1的升力上升,鏇翼3的升力下降,產生的不平衡力矩使機身繞y軸鏇轉(方向如圖所示),同理,當電機1的轉速下降,電機3的轉速上升,機身便繞y軸向另一個方向鏇轉,實現飛行器的俯仰運動。滾轉運動與圖(b)的原理相同,在圖(c)中,改變電機2和電機4的轉速,保持電機1和電機3的轉速不變,則可使機身繞x軸鏇轉(正向和反向),實現飛行器的滾轉運動。偏航運動四鏇翼飛行器偏航運動可以藉助鏇翼產生的反扭矩來實現。鏇翼轉動過程中由於空氣阻力作用會形成與轉動方向相反的反扭矩,為了克服反扭矩影響,可使四個鏇翼中的兩個正轉,兩個反轉,且對角線上的各個鏇翼轉動方向相同。反扭矩的大小與鏇翼轉速有關,當四個電機轉速相同時,四個鏇翼產生的反扭矩相互平衡,四鏇翼飛行器不發生轉動;當四個電機轉速不完全相同時,不平衡的反扭矩會引起四鏇翼飛行器轉動。在圖(d)中,當電機1和電機3的轉速上升,電機2和電機4的轉速下降時,鏇翼1和鏇翼3對機身的反扭矩大於鏇翼2和鏇翼4對機身的反扭矩,機身便在富餘反扭矩的作用下繞z軸轉動,實現飛行器的偏航運動,轉向與電機1、電機3的轉向相反。因為電機的總升力不變,飛機不會發會垂直運動。前後運動要想實現飛行器在水平面內前後、左右的運動,必須在水平面內對飛行器施加一定的力。在圖(e)中,增加電機3轉速,使拉力增大,相應減小電機1轉速,使拉力減小,同時保持其它兩個電機轉速不變,反扭矩仍然要保持平衡。按圖(b)的理論,飛行器首先發生一定程度的傾斜,從而使鏇翼拉力產生水平分量,因此可以實現飛行器的前飛運動。向後飛行與向前飛行正好相反。當然在圖(b)圖(c)中,飛行器在產生俯仰、翻滾運動的同時也會產生沿x、y軸的水平運動。側向運動在圖(f)中,由於結構對稱,所以側向飛行的工作原理與前後運動完全一樣。功能和套用
 四軸飛行器
四軸飛行器技術前沿
到2012年左右,國際上普遍認為四軸飛行器的控制已經不再是學術研究問題,而是成熟的技術。學術研究的方向也轉向了基於四軸飛行器做智慧型導航或者多飛行器的編隊控制。四軸飛行器的智慧型導航指的是利用機器視覺技術、人工智慧技術讓四軸飛行器能像人一樣在複雜環境中活動。多飛行器的編隊控制是指同時控制多個飛行器,或者讓多個飛行器自主編隊飛行。世界上較為優秀的四軸飛行器研究機構有美國賓夕法尼亞大學、瑞士聯邦蘇黎世理工學院、中國香港科技大學。四軸飛行器
Phantom精靈系列-DJI| 條目 | 內容 |
| 上市時間 | Phantom1(2012年12月),Phantom2(2013年10月), Phantom2Vision+(2014年4月) |
| 起飛重量(Phantom2Vision+) | 1284g |
| 電池容量和飛行時間(Phantom2Vision+) | 5200mAh,約25分鐘 |
| 遙控通訊距離(Phantom2Vision+) | 500m-700m |
| 懸停精度(Phantom2Vision+) | 垂直:0.8m;水平:2.5m |
| 其他功能1-雲台(Phantom2Vision+) | 可控範圍-90度至0度 |
| 其他功能2-相機(Phantom2Vision+) | 有效像素:1400萬 最大解析度:4384x3288 錄像效果:1080p30fps或720p 錄像FOV:可調110度或85度 |
| 其他功能3-手機APP(Phantom2Vision+) | iOS/Android 實時圖像傳輸和FPV飛行 遠程控制相機和參數設定 相冊同步分享 |
| 條目 | 內容 |
| 上市時間 | 2013年4月 |
| 最大起飛重量 | 3000g |
| 最大負載 | 1735g |
| 電池容量和飛行時間 | 1800g(含4S5800mAh電池)20分鐘 2500g(含4S5800mAh電池)14分鐘 |
| 飛行控制器 | SuperX |
| 懸停精度 | 垂直方向:±1.0m 水平方向:±2.0m |
| 雲台 | STELLA-“星雲” 雙軸無刷Gopro雲台 |
| 搭配相機 | Gopro系列運動相機 |
| 特點 | 可摺疊,便於攜帶。 更大負載能力,更長留空時間。 標配SuperX新一代飛行控制器,內置雲台增穩。 |
