四象限直流變換電路
正文
輸出電壓和電流平均值的幅值和極性均可隨控制信號而變的直流變換電路。它可運行於伏安特性的四個象限,生產中用以構成具有摩擦負載的可逆直流電動機調速系統(具有位能負載的可逆直流電動機調速系統可採用雙象限直流變換電路)。該調速系統的傳統形式是採用反並聯相控整流電路。但該電路存在深控下電網側功率因數很低和系統慣性過大的弱點,無法滿足諸如伺服系統一類要求快速回響的場合。而直流變換電路由於容許在直流電源側採用不控整流方式(見整流電路),因而網側功率因數高且不隨輸出電壓變化。由於直流變換電路採用斬波控制方式,斬波頻率遠高於電網頻率。斬波頻率的上限值視電路採用的器件而定,對普通晶閘管為500Hz;對可關斷晶閘管為1kHz;對雙極型功率電晶體為5kHz;對功率場效應電晶體為20kHz。這種系統慣性減小,快速回響性能好。四象限直流變換電路與雙象限直流變換電路一樣,也具有雙向傳輸功率的能力。已發展了多種四象限電路,並可大致分為以下不同類型:
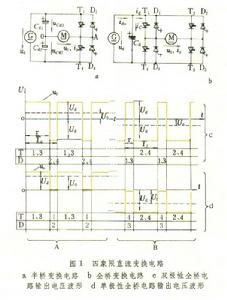 這兩種電路均能四象限運行(在有源負載下)。半橋電路需用的可控元件少,但在相同直流輸入電壓下,其輸出電壓幅值僅為全橋電路的一半。
這兩種電路均能四象限運行(在有源負載下)。半橋電路需用的可控元件少,但在相同直流輸入電壓下,其輸出電壓幅值僅為全橋電路的一半。 半控型電路指由普通晶閘管組成的變換電路;全控型電路指由具有自關斷能力的器件(如功率電晶體等)組成的電路。由於不需要附加換流電路,後者具有電路簡單和工作頻率高的優點,較易實現小型輕量化。
凡在一個斬波周期中輸出電壓極性有一次變化的電路稱為雙極性電路;相反則稱為單極性電路。後者電流脈動小,但在輕載下會出現負載電流斷續;前者電流脈動大,但電流無斷續。
雙極性全橋電路 電路如圖1b所示。設橋中各可控元件的控制極脈衝依次為ug1~ug4,且其狀態分布為ug1和ug3、ug2和ug4同相,ug1和ug4、ug2和ug3反相。各脈衝重複周期均為Tc,占空比D>0.5時電路輸出電壓u0波形如圖1c中時區A所示。平均值u0>0,相應的電流I0>0,電路運行於第一象限,電機工作於正轉電動狀態。若D<0.5時,u0波形如圖1c中時區B所示。U0<0,I0<0,電路工作於第三象限,電機以反轉電動狀態工作。對電路分析可知其直流增益Av為

由於電路結構上的原因,圖1a所示的半橋電路,只能以雙極性方式進行工作。
單極性全橋電路 電路結構仍如圖1b,但隨著可控元件控制極脈衝分布狀態不同,全橋電路既可以雙極性輸出電壓工作,也可以單極性工作。這時電路由T1和T4組成的導電臂稱為方向臂。當電機正轉時,有ug1>0,ug4=0,即T1常通而T4常斷。相反,當電機反轉時,有ug1=0,ug4>0,即T1常斷而T4常通。由T2和T3組成的導電臂稱為斬波臂,ug2和ug3在相位上互補,脈寬τ1和τ2(圖1d隨外加控制信號而變。於是,當T2(D2) 和T3(D3)輪番通斷時,輸出電壓u0的波形如圖ld所示。在時區A,有U0>0,I0>0,電路工作於第一象限,電機運行於正轉電動狀態。在時區B,有U0<0,I0<0,電路工作於第三象限,電機運行於反轉電動狀態。
推挽式電路 又稱四象限丘克電路。其主電路結構如圖2a所示。
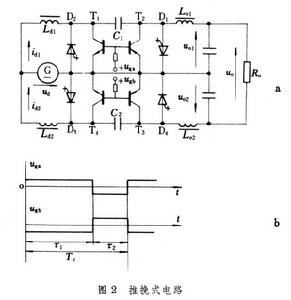 由圖可見,該電路實際上是兩隻雙象限丘克電路的推挽連線。由T1、T2組成的雙象限丘克電路的出端電壓為u01,由T3、T4組成的另一雙象限丘克電路的出端電壓為u02,推挽電路的輸出電壓u0是u01與u02之差(按圖示正方向)。由電路分析知:
由圖可見,該電路實際上是兩隻雙象限丘克電路的推挽連線。由T1、T2組成的雙象限丘克電路的出端電壓為u01,由T3、T4組成的另一雙象限丘克電路的出端電壓為u02,推挽電路的輸出電壓u0是u01與u02之差(按圖示正方向)。由電路分析知: 
參考書目
姚紀文編:《自動控制元件及其線路》,國防工業出版社,北京,1980。
徐強:《脈寬調速系統》,上海科技文獻出版社,上海,1983。
