
原理
兩個物體之間的作用力和反作用力,總是大小相等,方向相反。力不能離開物體單獨存在。這便是著名的牛頓第三定律。
噴氣推進屬於直接反作用運動。那么什麼是噴氣推進呢?將物質以氣體噴射的形式從被推進的物體中噴出,這種推進方式稱為噴氣推進。
當物體受到力的作用時,會產生一個與物體受到的力相反方向的推力。發動機工作時,大量的氣體(高溫燃氣或空氣)以高速度向後噴出,產生與飛機飛行方向一致的推力,推動飛機克服空氣給他的阻力而向前飛行。反推力一般是指由反推力裝置和引擎噴出的氣流。
噴氣推進所噴射的物質叫做推進劑;利用噴氣推進產生推力的發動機,叫做噴氣發動機。運動時,相互作用的物體,一個是發動機本身,另一個是從它內部噴出的高速氣流。高速氣流產生的反作用力作用於發動機本身,方向與氣流方向相反,這就是推力。
套用反作用噴氣的發動機分為兩大類:
一是空氣噴氣發動機,它是利用大氣來產生噴氣射流的噴氣發動機。例如:以大氣中的氧氣作為氧化劑,燃燒燃料產生燃氣射流;或在核子熱交換器中加熱空氣,然後由噴管排出;
二是火箭發動機,它是自身攜帶全部噴射物質的噴氣發動機。例如:帶有氧化劑和燃燒劑以產生燃氣射流。
火箭發動機所達到的推力和速度遠遠超過了一般的推進方法。這種發動機不依賴周圍介質條件,在空間環境也能工作,這一特點,保證了在不同飛行速度下,發動機產生的推力不受空氣接受能力的影響,而是恆定的,這也使得火箭(發動機)所能達到的飛行速度比其它任何類型發動機要高得多;其次,由於是直接反作用運動,沒有中間機構,在主要的噴射通道中不存在限制工作溫度的運動機構,這就決定了火箭發動機的結構簡單,而所產生的推力卻很大。
十字梁體的構造及工作原理
十字梁實驗系統是一個用於驗證噴氣反作用控制的作用和效果的實驗平台,以十字梁為研究對象,可以對各種經典的和現代的控制算法進行驗證。該系統以TI公司的TMS320LF2407 DSP控制器為核心,由兩個加速度計和一個陀螺儀組成姿態角測量系統,根據PWM控制原理實現開關電磁閥的比例控制,從而控制噴氣反作用力的大小,最終控制梁體的旋轉角度。給出了仿真結果和實驗結果的對比圖,說明了模型的正確性。所設計的系統回響快,精度高,具有很高的工程套用價值。
對反作用力控制將出現在超音速驗證機的最早飛行評估已是公認, 但也堅信基於地面的仿真研究將首先進行。此項研究早在Dryden飛行研究中心展開。
第一階段, 該中心己開發出一個底座固定的裝置, 它具有一台解運動平衡方程的模擬計算機。
第二階段, 將把它與一個具有駕駛控制的機械移動模擬器結合在一起。
模擬器的構造
 反作用噴氣
反作用噴氣該模擬器由一對I字犁金屬梁構成, 兩金屬梁的結合處在它們的中心點, 我們稱該梁為鐵十字梁( 圖1所示)。通過對模擬器的質量進行適當的分配, 使其重心位於支架支點上來達到平衡的目的。 I字型梁是通過一個萬向節安裝在中心支架上米進行三軸旋轉。 飛行員的位置在一柒的末端, 與座位、 控制桿和顯示傾斜角、 俯仰、 偏航、 攻角的主顯示器連在一起, 梁體的其它末端共安裝了六個噴嘴, 用來噴 總第6 4 期郭振凱等:噴氣反作用姿態控制的套用與發展4 15射高壓氮氣, 以提供反作用力對梁體進行控制。 在這種條件下對模擬器起作用的力除了來自反作用控制外, 還來自萬向節的機械摩擦。圖l十字梁模擬器圖
模擬器的工作原理
 反作用噴氣
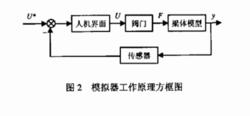
反作用噴氣模擬器被米白梁翼右端的噴嘴噴山的氮氣所產生的力操縱, 並分別運用滾動控制、 俯仰和偏航控制來使其最終達到平衡。 氮氣從儲存罐通過輸送管到達噴嘴; 在噴嘴兩末端的電磁閥提供氮氣的噴射控制。 反作用力的變化是通過調節管口的大小米產生理想的推力。飛行員的控制桿是與眾不同的, 岡為它提供了三軸控制: 滾動、 俯仰和偏航。 沒有方向舵踏板米控制偏航, 它被飛行員在控制桿項部的拇指的橫向運動代替控制。 飛行期間飛行員的主要任務是在反作用控制區域使飛機在飛行軌道上穩定飛行。 在兩分鐘的測試運行中這類飛行被模擬, 給滾動、 俯仰和偏航速度一個小的初始干擾後, 飛行員被命令維持零滾動、 俯仰和偏航角。 第二個任務與飛行員控制高旋轉率的能力有關。 該任務通過利用有關三軸的初始干擾和不斷的增K干擾量級, 直到該運動不能被控制為止來進行評估。對機械模擬器進行測試, 是為了在比模擬計算機更接近飛行的條件下, 對反作用控制特性進行定性分析。 模擬研究結果被用米建立有效控制范周。在這個範圍內, 各種有效控制的水平, 在模擬器上通過測試和對每層水平的靈活控制進行比較, 以得到評估。 飛行員的控制任務是在運行期間, 當被施加一個小的外部干擾時來維持一個穩定的姿態。通過人J二控制模擬計算機和機械模擬器來控制噴氣反作用力, 主要研究各種控制配置、 控制量、控制技術、 動態壓、 噴氣推力延遲效應、 氣動穩定量的影響。 這項研究局限於加速度命令控制。 鐵十字梁有一個質量配置, 與x-1B樣機的慣性比率相匹配, 使它成為第一個用來測試反作用力控制飛行的飛行器( 圖2所示)。
仿真結果比較
模擬計算機和鐵十字梁的使用, 說明該控制技術與空氣動力學控制有所不同。 非常平衡的飛行很難用手控來維持, 因為它非常容易造成控制過度,全開、 全關減弱控制與比例噴氣控制之間沒有本質的差異, 但飛行員傾向於開關技術, 即使它們有比例控制。 後來, 該技術成為飛行員在X-15上使用反作用力控制的首選技術。對速度和姿態命令反作用控制進行過研究, 並且與加速度命令控制比較, 對一個更廣範圍的有效控制來說, 比例加速度反作用控制比開關加速度控制更能獲得一個比較滿意的效果, 而速度和姿態控制則優於兩種加速度控制; 比例加速度, 速度和姿態命令系統在燃料需求上是相似的, 對實際火箭系統延遲具有魯棒性。 經過反角效應, 動壓使控制問題變得複雜, 但速度和姿態系統使這些效應最小化。對反作用控制特性的估計來自飛行員的評論和來自對兩分鐘運行的總推力的要求。 除了提供有關噴氣類型反作用控制的燃料需求外, 推力信息也被作為表示控制效率的一個方面, 因為它是控制量的一個測量尺度。通過反作用控制模擬器的研究, 可得到如下結論:
( 1)速度或姿態命令反作用控制系統, 將促進在低動壓區的定向和穩定任務的發展。
( 2)所有系統對可能在實際火箭系統中遇到的延遲具有魯棒性。 但是, 對大的延遲比例加速度系統的效率, 比其它控制系統的效率降低得更快。
 反作用噴氣
反作用噴氣( 3)通過偏航和滾動氣動耦合, 動壓使穩定和定向問題變得更加複雜。 對穩定性來說, 姿態命令系統優於速度命令系統, 但速度命令系統更適合於定向。 研究結果表明, 理想的姿態控制在動壓達到20b\ 時, 可通過加速度命令噴氣反作用姿態控制來維持。
反作用噴氣套用歷史
 反作用噴氣
反作用噴氣一般而言, 反作用噴氣控制方法, 對像樣機這樣設計在低動壓、 短周期操作的運載工具, 將非常有意義。 動量類型控制將被套用到長期的空間運轉上, 因為, 長期在臨界層上的相當高度運行, 可能用依靠外界環境因素控制方法更實用, 像太陽輻射壓力、 引力、 磁力。NACA高速飛行站, 已開始了對高海拔飛行反作用力控制的研究。 該研究包括模擬器研究和飛行測試, 它將研究兩種類型的反作力控制。 由於噴氣控制對課題有更直接的利益關係, 所以它被選作首要研究課題。 儘管選用x-lB 飛機來研究各種性能, 但堅信研究結果能提供與噴氣反作用力控制有關的總體信息。
評估零、低動壓下各種反作用控制
然而, 最初的研究被用來評估零動壓下各種反作用控制的所有特性。 更有前途的配置是用來研究低動壓下的控制特性。在1997年3月 , 美國國家航空和宇宙航行局開始著手一項意義重大的計畫, 即高超音速飛行研究計畫,來論證在高超音速範圍飛行器上使用超音速衝壓噴射發動機技術, 像大家所知道的x-43A 。其目的是擴展將來可以軍用和民用的高超音速飛行技術基礎。在未來幾年內, 該計畫在NASA Drvden飛行研究中心中將是最有意義的一項工程。 2001年6月3日,美國高超音速飛行器X-43A在加州愛德華空軍基地作了首次試驗。採用一體成型的衝壓發動機, 由B-52飛機在5400-11700m高空發射, 由帶翼助推器, 企圖得到7 -10馬赫數的速度, 使它在37500m高空上飛行, 最後失敗( 圖3所示)。儘管x-43A飛行試驗失敗了, 但這並不代表該計畫會取消,相反,為我們提供了許多深刻的經驗教訓。 為了研製出滿足設計要求的高超音速飛行器, 必須有效地套用三個手段, 即地面試驗、 計算和飛行試驗。由於這些手段都有局限性, 為了滿足設計高超音速飛行器的需要, 就應綜合利用這些手段, 以及對川這些手段獲得的數據進行綜合分析。
空空飛彈敏捷轉彎
為研究具有大離軸角及越肩發射能力的先進空空飛彈初始段敏捷轉彎方法,研究了裝有反作用噴氣控制系統的空空飛彈的大角度姿態過失速機動控制律。反作用噴氣控制系統用來提供大角度敏捷轉彎時大攻角飛行的控制力矩。利用時間尺度分離的方法將飛彈的姿態動力學和運動學系統分別看作快子系統和慢子系統 。用李亞普諾夫方法設計了慢子系統控制律,利用滑動模態方法設計了快子系統控制律,在該控制律作用下,飛彈閉環系統不僅是穩定的而且其動態品質也可以得到保證。分析了控制系統的魯棒性,結果表明:所提控制方法能夠有效消除空空飛彈大角度姿態機動時轉動慣量變化以及各種力矩干擾的影響 。
