 環視系統安裝示意圖
環視系統安裝示意圖產生背景
隨著圖像和計算機視覺技術的快速發展,越來越多的技術被套用到汽車電子領域,傳統的基於圖像的倒車影像系統只在車尾安裝攝像頭,只能覆蓋車尾周圍有限的區域,而車輛周圍和車頭的盲區無疑增加了安全駕駛的隱患,在狹隘擁堵的市區和停車場容易出現碰撞和刮蹭事件。為擴大駕駛員視野,就必須能感知360°全方位的環境,這就需要多個視覺感測器的相互協同配合作用然後通過視頻合成處理,形成全車周圍的一整套的視頻圖像,就是有這類需求,全景視覺泊車輔助系統應運而生。
 全景環視系統使用演示圖
全景環視系統使用演示圖工作原理
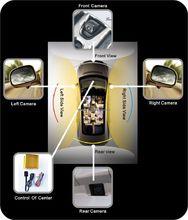
全景環視系統,它包括有:安裝於汽車四周的多個攝像頭、圖像採集部件、視頻合成/處理部件、數字圖像處理部件、車載顯示器;攝像頭分別拍攝汽車前後左右的圖像,圖像被圖像採集部件轉換成數字信息送至視頻合成/處理部件,視頻合成/處理部件處理後的圖像經由數字圖像處理部件處理後轉換成模擬信號輸出,在安裝於汽車內部的車載顯示器上生成汽車及其周邊環境的全景圖像信息。
功能用途
 全景環視系統的前後左右四個標準攝象頭
全景環視系統的前後左右四個標準攝象頭全景環視系統:它為汽車駕駛提供更為直觀的輔助駕駛圖像信息, 在汽車輔助駕駛和汽車安全上有著非常好的套用前景。
 環視系統主機盒
環視系統主機盒全景環視系統功能介紹
該系統對於大體積的汽車來說可以明顯減少停車入位時造成的剮蹭事故。此外,對於擁擠的都市駕駛也能起到輔助的作用。
酷多全景環視系統,有適應6種套用場景,7大設計特點,8種使用功能。比較有效幫助駕駛者提升駕駛水平,提高駕駛的安全性和駕駛樂趣。
