
基本原理
 二自由度陀螺儀
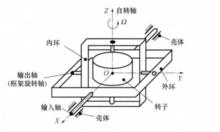
二自由度陀螺儀二自由度陀螺儀基本原理如右圖所示,它由轉子、萬向環架的內環及外環所組成。轉子安裝在內環的軸承上,並以常值角速度 Ω繞自轉軸 Z相對於內環高速旋轉;內環通過一堆軸承和外環相連,內環可以繞內環軸 Y相對於外環轉動;外環又通過另一對軸承和陀螺儀的殼體相連,並且可以繞外環軸 X相對於殼體轉動。內環周 X、外環軸 Y 及轉子自轉軸 Z 相互垂直,三軸相較於一點 O ,該交點為陀螺儀的固定不動點,陀螺儀的所有角運動都以某一瞬間角速度相對於固定不動點 O 而轉動。
二自由度陀螺儀有三個自由度:一是繞自轉軸 OZ相對於內環的轉動;二是帶有轉子的內環繞內環軸 OY的轉動;三是帶有內環及轉子的外環繞外環軸 OX的轉動,故稱此類陀螺儀為二自由度陀螺儀。二自由度陀螺儀可實現 OZ軸指向任意慣性空間。
取向
 二自由度陀螺儀的取向
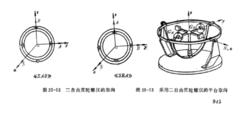
二自由度陀螺儀的取向二自由度陀螺儀在套用中相當於兩個積分陀螺儀,其內環軸 A和外環軸 B均為穩定軸,可同時提供兩條正交的穩定軸線。由於二自由度陀螺儀為複合結構體,它的取向形式是有限的。通常用於穩定 z軸和 y軸的取向有兩種(如右圖):《SAB》,即自轉軸 S沿 x軸方向,外環軸 B沿 z軸方向,內環軸 A沿 y軸方向;《SBA》,既自轉軸 S沿 x軸方向,外環軸 B沿 y軸方向,內環軸 A沿 z軸方向。
沿內環軸作用的干擾力矩,主要是由於陀螺組合件(內環組合件)的缺陷引起的,而沿外環軸 B的干擾力矩,不僅包括內環組件缺陷引起的有害力矩,而且還包括外環構建缺陷產生的有害力矩。因此, B軸的漂移率較 A軸低。在設計中,可根據具體要求確定合理的取向形式。
採用二自由度陀螺儀的慣性平台,多選用兩個陀螺儀。陀螺N-《SBA》;陀螺E-《BSA》(如右圖)。當利用殼體旋轉法補償陀螺漂移時,陀螺的取向為N-《SBA》,E-《SAB》。
套用
單軸穩定器
 單軸穩定器結構原理圖
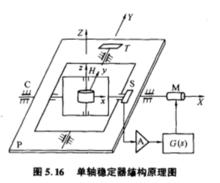
單軸穩定器結構原理圖二自由度陀螺儀可用來組成單軸穩定器,右圖給出了用二自由度陀螺儀作為敏感元件組成的單軸穩定器結構原理圖。圖中 C表示飛行器載體,其上裝著單軸平台 P,在平台上安裝一個二自由度液浮陀螺儀,用坐標系 OXYZ來表示平台坐標系,對應的陀螺儀坐標系用 Oxyz來表示,陀螺儀的內環軸和被穩定的平台軸平行安放,即 Ox平行於 OX。
在陀螺的內環軸上裝有信號感測器 S。由於二自由度陀螺儀是相對慣性空間穩定的,因此,當平台繞 OX軸有干擾力矩 M存在時,平台繞 OX軸相對慣性空間有轉角產生,也就相當於繞陀螺的內環軸有偏差角出現,陀螺內環軸上信號感測器 S就有信號輸出,此信號經過平台控制器送入直流力矩電機,該力矩電機帶動平台旋轉,消除此偏角,或達到力矩平衡,從而保證了平台相對慣性空間繞 X軸的穩定。
