
簡介
方位陀螺儀是能使自轉軸保持近似水平的二自由度陀螺儀。它是利用陀螺特性而做成的測量飛機航向角的一種陀螺儀表。
測量飛機航向角的最簡單辦法,是利用磁針指北原理而做成的磁羅盤,它可以測出飛機的磁航向。但是,當飛機加速、轉彎或盤旋飛行時,磁羅盤中心懸掛的敏感元件受加速度干擾而偏離磁子午線,將產生很大的指示誤差;當飛機在鐵礦地區或鋼鐵城市等強磁地區上空飛行時,地磁水平分量小,磁羅盤也無法正常工作。由於磁羅盤工作的局限性,需要利用方向陀螺儀測量飛機的航向角,以保證飛機沿著預定的航向飛行。所以,方向陀螺儀也是飛機上一種重要的航行駕駛儀表。
當使用自動駕駛儀操縱飛機時,需要測出飛機相對給定航向的偏航角並轉換成電信號。以控制飛機按照預定的航向飛行。所以,方向陀螺儀也是飛機自動駕駛儀的主要部件之一。
二自由度陀螺儀具有方向穩定性,如果把它的外框垂直放置,自轉軸水平並指北,則在飛機有加速度干擾或外界磁場干擾時,自轉軸繞外框軸仍將穩定在原來的方向上。但是,由於地球自轉和飛機運動會引起表觀進動,加之陀螺儀本身存在漂移,所以自轉軸將會逐漸偏離當地水平面和當地子午面。自轉軸的水平偏離,有可能導致自轉軸與外框軸重合而出現框架自鎖。自轉軸的方位偏離,將導致航向角的測量誤差隨時間而積累。因此,欲利用二自由度陀螺儀構成測量航向的儀表,就需要對陀螺儀進行水平修正和方位修正。水平修正是保證儀表正常工作的前提,方位修正則是保證儀表測量精度所必需。
結構原理
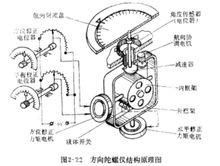 圖1 方位(向)陀螺儀結構原理圖
圖1 方位(向)陀螺儀結構原理圖比較典型的方位陀螺儀的結構原理如右圖1所示。它主要由二自由度陀螺儀、水平修正裝置、方位修正裝置、航向協調裝置和指示機構或角度感測器等部分組成。
水平修正裝置由擺式敏感元件和力矩器組成。電路中的液體開關為三極式,它安裝在內框架上,而力矩電機安裝在外框軸方向。液體開關與力矩電機的聯接電路稱為水平修正電路,其電路原理如右圖2所示。當自轉軸繞內框軸偏離水平面時,液體開關送出控制信號,力矩電機產生繞外框軸作用的修正力矩,使自轉軸繞內框軸進動而恢復水平。這樣,就保證了自轉軸與外框軸的近似垂直關係。為了避免飛機轉彎或盤旋時所引起的錯誤修正,可以通過角速度敏感器件中的繼電器控制力矩電機激磁繞組的斷開來實現。
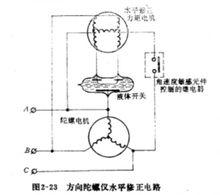 圖2 方向陀螺儀水平修正電路
圖2 方向陀螺儀水平修正電路方位修正裝置通常由電位器和力矩電機組成。電位器安裝在控制盒內,力矩電機安裝在內框軸方向。電位器給出地球自轉誤差等補償信號,力矩電機產生繞內框軸作用的修正力矩,使自轉軸繞外框軸進動而跟蹤因地球自轉所引起的方位變化。這樣。便提高了自轉軸繞外框軸的方位穩定精度。
但是方位陀螺儀並不具有自動找北的特性,所以飛行員在使用之前必須根據磁羅盤或天文羅盤的指示,來調整方位陀螺儀的指示。而且,方位修正也不能完全消除方位陀螺儀的方位偏離誤差,所以飛行員在使用過程中每隔一定時間例如15分鐘或30分鐘,還必須根據磁羅盤或天文羅盤的指示,對方位陀螺儀的指示進行調整。這種調整稱為航向協調或航向校正。
航向協調裝置通常由協調按鈕、協調電機和減速器組成。協調按鈕安裝在控制盒上,協調電機和減速器安裝在外框架上。當按下協調按鈕時,接通協調電機的電路,協調電機通過減速器帶動刻度盤相對外框架轉動,從而使方位陀螺儀的指示與其它航向儀表的指示相協調。
採取了上述措施,便能使陀螺儀相對子午面較精確地保持方位穩定,給飛機航向角的測量提供了基準。藉助指標和刻度盤組成的指示機構,即可給出飛機航向角的判讀指示。若在外框軸上裝有電位器或自整角機等角度感測器,則可傳輸飛機航向角的電氣信號。
方位陀螺儀的航向協調是由飛行員人工定時進行,在兩次協調的時間間隔內,仍然有方位誤差積累而影響測量精度,而且人工校正還增加了飛行員的負擔,因此,目前一般都採用自動校正的辦法,即利用磁航向感測器(實為一種能輸出磁航向信號的磁羅盤)來自動地對方向陀螺儀進行航向校正,並且由航向指示器把方位陀螺儀所穩定的航向指出來。這種測量航向的儀表稱為陀螺磁羅盤。
