
定義
 UART
UARTUART是一種通用串列數據匯流排,用於異步通信。該匯流排雙向通信,可以實現全雙工傳輸和接收。在嵌入式設計中,UART用來主機與輔助設備通信,如汽車音響與外接AP之間的通信,與PC機通信包括與監控調試器和其它器件,如EEPROM通信。
功能
計算機內部採用並行數據,不能直接把數據發到Modem,必須經過UART整理才能進行異步傳輸,其過程為:CPU先把準備寫入串列設備的數據放到UART的暫存器(臨時記憶體塊)中,再通過FIFO(First Input First Output,先入先出佇列)傳送到串列設備,若是沒有FIFO,信息將變得雜亂無章,不可能傳送到Modem。
它是用於控制計算機與串列設備的晶片。有一點要注意的是,它提供了RS-232C數據終端設備接口,這樣計算機就可以和數據機或其它使用RS-232C接口的串列設備通信了。作為接口的一部分,UART還提供以下功能:將由計算機內部傳送過來的並行數據轉換為輸出的串列數據流。將計算機外部來的串列數據轉換為位元組,供計算機內部並行數據的器件使用。在輸出的串列數據流中加入奇偶校驗位,並對從外部接收的數據流進行奇偶校驗。在輸出數據流中加入啟停標記,並從接收數據流中刪除啟停標記。處理由鍵盤或滑鼠發出的中斷信號(鍵盤和滑鼠也是串列設備)。可以處理計算機與外部串列設備的同步管理問題。有一些比較高檔的UART還提供輸入輸出數據的緩衝區,比較新的UART是16550,它可以在計算機需要處理數據前在其緩衝區記憶體儲16位元組數據,而通常的UART是8250。如果您購買一個內置的數據機,此數據機內部通常就會有16550 UART。
通信協定
 UART
UARTUART作為異步串口通信協定的一種,工作原理是將傳輸數據的每個字元一位接一位地傳輸。
其中各位的意義如下:
起始位:先發出一個邏輯”0”的信號,表示傳輸字元的開始。
資料位:緊接著起始位之後。資料位的個數可以是4、5、6、7、8等,構成一個字元。通常採用ASCII碼。從最低位開始傳送,靠時鐘定位。
奇偶校驗位:資料位加上這一位後,使得“1”的位數應為偶數(偶校驗)或奇數(奇校驗),以此來校驗資料傳送的正確性。
停止位:它是一個字元數據的結束標誌。可以是1位、1.5位、2位的高電平。由於數據是在傳輸線上定時的,並且每一個設備有其自己的時鐘,很可能在通信中兩台設備間出現了小小的不同步。因此停止位不僅僅是表示傳輸的結束,並且提供計算機校正時鐘同步的機會。適用於停止位的位數越多,不同時鐘同步的容忍程度越大,但是數據傳輸率同時也越慢。
空閒位:處於邏輯“1”狀態,表示當前線路上沒有資料傳送。
波特率:是衡量資料傳送速率的指標。表示每秒鐘傳送的符號數(symbol)。一個符號代表的信息量(比特數)與符號的階數有關。例如資料傳送速率為120字元/秒,傳輸使用256階符號,每個符號代表8bit,則波特率就是120baud,比特率是120*8=960bit/s。這兩者的概念很容易搞錯。
基本結構
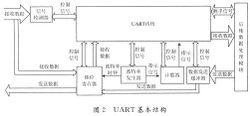 uart基本結構
uart基本結構⑴輸出緩衝暫存器,它接收CPU從數據匯流排上送來的並行數據,並加以保存。
⑵ 輸出移位暫存器,它接收從輸出緩衝器送來的並行數據,以傳送時鐘的速率把數據逐位移出,即將並行數據轉換為串列數據輸出。
⑶ 輸入移位暫存器,它以接收時鐘的速率把出現在串列數據輸入線上的數據逐位移入,當數據裝滿後,並行送往輸入緩衝暫存器,即將串列數據轉換成並行數據。
⑷ 輸入緩衝暫存器,它從輸入移位暫存器中接收並行數據,然後由CPU取走。
⑸控制暫存器,它接收CPU送來的控制字,由控制字的內容,決定通信時的傳輸方式以及數據格式等。例如採用異步方式還是同步方式,數據字元的位數,有無奇偶校驗,是奇校驗還是偶校驗,停止位的位數等參數。
⑹狀態暫存器。狀態暫存器中存放著接口的各種狀態信息,例如輸出緩衝區是否空,輸入字元是否準備好等。在通信過程中,當符合某種狀態時,接口中的狀態檢測邏輯將狀態暫存器的相應位置“1”,以便讓CPU查詢。
設計思想
 UART
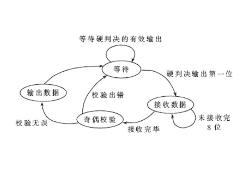
UART數據傳送的思想是,當啟動位元組傳送時,通過TxD先發起始位,然後發數據位和奇偶數效驗位,最後再發停止位,傳送過程由傳送狀態機控制,每次中斷只傳送1個位,經過若干個定時中斷完成1個位元組幀的傳送。
數據接收的思想是,當不在位元組幀接收過程時,每次定時中斷以3倍的波特率監視RxD的狀態,當其連續3次採樣電平依次為1、0、0時,就認為檢測到了起始位,則開始啟動一次位元組幀接收,位元組幀接收過程由接收狀態機控制,每次中斷只接收1個位,經過若干個定時中斷完成1個位元組幀的接收。
為了提高串口的性能,在傳送和接收上都實現了FIFO功能,提高通信的實時性。FIFO的長度可以進行自由定義,適套用戶的不同需要。
波特率的計算按照計算公式進行,在設定最高波特率時一定要考慮模擬串口程式代碼的執行時間,該定時時間必須大於模擬串口的程式的規定時間。單片機的執行速度越快,則可以實現更高的串口通訊速度。
工作原理
傳送接收
傳送邏輯對從傳送FIFO 讀取的數據執行“並→串”轉換。控制邏輯輸出起始位在先的串列位流,並且根據控制暫存器中已編程的配置,後面緊跟著數據位(注意:最低位 LSB 先輸出)、奇偶校驗位和停止位。
在檢測到一個有效的起始脈衝後,接收邏輯對接收到的位流執行“串→並”轉換。此外還會對溢出錯誤、奇偶校驗錯誤、幀錯誤和線中止(line-break)錯誤進行檢測,並將檢測到的狀態附加到被寫入接收FIFO 的數據中。
波特率
波特率除數(baud-rate divisor)是一個22 位數,它由16 位整數和6 位小數組成。波特率發生器使用這兩個值組成的數字來決定位周期。通過帶有小數波特率的除法器,在足夠高的系統時鐘速率下,UART 可以產生所有標準的波特率,而誤差很小。
數據收發
傳送時,數據被寫入傳送FIFO。如果UART 被使能,則會按照預先設定好的參數(波特率、數據位、停止位、校驗位等)開始傳送數據,一直到傳送FIFO 中沒有數據。一旦向傳送FIFO 寫數據(如果FIFO 未空),UART 的忙標誌位BUSY 就有效,並且在傳送數據期間一直保持有效。BUSY 位僅在傳送FIFO 為空,且已從移位暫存器傳送最後一個字元,包括停止位時才變無效。即 UART 不再使能,它也可以指示忙狀態。BUSY 位的相關庫函式是UARTBusy( )
在UART 接收器空閒時,如果數據輸入變成“低電平”,即接收到了起始位,則接收計數器開始運行,並且數據在Baud16 的第8 個周期被採樣。如果Rx 在Baud16 的第8 周期仍然為低電平,則起始位有效,否則會被認為是錯誤的起始位並將其忽略。
如果起始位有效,則根據數據字元被編程的長度,在 Baud16 的每第 16 個周期對連續的數據位(即一個位周期之後)進行採樣。如果奇偶校驗模式使能,則還會檢測奇偶校驗位。
最後,如果Rx 為高電平,則有效的停止位被確認,否則發生幀錯誤。當接收到一個完整的字元時,將數據存放在接收FIFO 中。
中斷控制
出現以下情況時,可使UART 產生中斷:
FIFO 溢出錯誤
線中止錯誤(line-break,即Rx 信號一直為0 的狀態,包括校驗位和停止位在內)
奇偶校驗錯誤
幀錯誤(停止位不為1)
接收逾時(接收FIFO 已有數據但未滿,而後續數據長時間不來)
傳送
接收
由於所有中斷事件在傳送到中斷控制器之前會一起進行“或運算”操作,所以任意時刻 UART 只能向中斷產生一個中斷請求。通過查詢中斷狀態函式UARTIntStatus( ),軟體可以在同一個中斷服務函數裡處理多箇中斷事件(多個並列的if 語句)。
FIFO操作
 UART
UARTFIFO 是“First-In First-Out”的縮寫,意為“先進先出”,是一種常見的佇列操作。 Stellaris 系列ARM 的UART 模組包含有2 個16 位元組的FIFO:一個用於傳送,另一個用於接收。可以將兩個FIFO 分別配置為以不同深度觸發中斷。可供選擇的配置包括:1/8、 1/4、1/2、3/4 和7/8 深度。例如,如果接收FIFO 選擇1/4,則在UART 接收到4 個數據時產生接收中斷。
傳送FIFO的基本工作過程: 只要有數據填充到傳送FIFO 里,就會立即啟動傳送過程。由於傳送本身是個相對緩慢的過程,因此在傳送的同時其它需要傳送的數據還可以繼續填充到傳送 FIFO 里。當傳送 FIFO 被填滿時就不能再繼續填充了,否則會造成數據丟失,此時只能等待。這個等待並不會很久,以9600 的波特率為例,等待出現一個空位的時間在1ms 上下。傳送 FIFO 會按照填入數據的先後順序把數據一個個傳送出去,直到傳送 FIFO 全空時為止。已傳送完畢的數據會被自動清除,在傳送FIFO 里同時會多出一個空位。
接收FIFO的基本工作過程: 當硬體邏輯接收到數據時,就會往接收FIFO 里填充接收到的數據。程式應當及時取走這些數據,數據被取走也是在接收FIFO 里被自動刪除的過程,因此在接收 FIFO 里同時會多出一個空位。如果在接收 FIFO 里的數據未被及時取走而造成接收FIFO 已滿,則以後再接收到數據時因無空位可以填充而造成數據丟失。
收發FIFO 主要是為了解決UART 收發中斷過於頻繁而導致CPU 效率不高的問題而引入的。在進行 UART 通信時,中斷方式比輪詢方式要簡便且效率高。但是,如果沒有收發 FIFO,則每收發一個數據都要中斷處理一次,效率仍然不夠高。如果有了收發FIFO,則可以在連續收發若干個數據(可多至14 個)後才產生一次中斷然後一併處理,這就大大提高了收發效率。
完全不必要擔心FIFO 機制可能帶來的數據丟失或得不到及時處理的問題,因為它已經幫你想到了收發過程中存在的任何問題,只要在初始化配置UART 後,就可以放心收發了, FIFO 和中斷例程會自動搞定一切。
迴環操作
UART 可以進入一個內部迴環(Loopback)模式,用於診斷或調試。在迴環模式下,從Tx 上傳送的數據將被Rx 輸入端接收。
串列協定
在某些 Stellaris 系列 ARM 晶片里,UART 還包含一個IrDA串列紅外(SIR)編碼器/ 解碼器模組。IrDA SIR 模組的作用是在異步UART數據流和半雙工串列SIR 接口之間進行轉換。片上不會執行任何模擬處理操作。SIR 模組的任務就是要給UART 提供一個數字編碼輸出和一個解碼輸入。UART 信號管腳可以和一個紅外收發器連線以實現IrDA SIR物理層連線。
型號
| Model | Description |
| EXAR XR21V1410 | |
| Intersil 6402 | |
| Z8440 | 2000 kbit/s. Async, Bisync, SDLC , HDLC , X.25 . CRC . 4 位元組接收緩衝區, 2 位元組傳送緩衝區, DMA .[1] |
| Intel 8251 | USART,異步通信最高 19.2kbit/s,同步通信最高 64kbit/s[2] |
| NS INS8250 | 緩衝區只有 1 位元組的老舊型式 |
| Motorola 6850 | |
| 6522 | |
| 6551 | |
| Rockwell 65C52 | |
| 16450 | 具有兩組 UART, 代號 164 = 82 x 2 暗示了它的特性。 以下 16 開頭的都有兩組 UART |
| 16550 | 推出後發現 FIFO 存在 bug,隨即以 16550A 取代 |
| 16550A | 16 位元組緩衝區,可設為 TL=1,4,8,14; 標準最高速度 115.2 kbit/s, 也有可達 230.4 或 460.8 kbit/s 的,支援 DMA [3] |
| 16C552 | |
| 16650 | 32 位元組緩衝區,最高速度 460.8 kbit/s |
| 16750 | 64 位元組傳送緩衝區, 56 位元組接收緩衝區,最高速度 921.6 kbit/s |
| 16850 | 128 位元組緩衝區,最高速度 460.8 kbit/s 或 1500 kbit/s |
| 16C850 | |
| 16950 | |
| Hayes ESP | 1 k 位元組緩衝區 |
通信速度
數據傳輸可以首先從最低有效位(LSB)開始。然而,有些UART允許靈活選擇先傳送最低有效位或最高有效位(MSB)。
微控制器中的UART傳送數據的速度範圍為每秒幾百位到1.5Mb。例如,嵌入在ElanSC520微控制器中的高速UART通信的速度可以高達1.152Mbps。UART波特率還受傳送和接收線對距離(線長度)的影響。
市場上有隻支持異步通信和同時支持異步與同步通信的兩種硬體可用於UART。前者就是UART名字本身的含義,在摩托羅拉微控制器中被稱為串列通信接口(SCI);Microchip微控制器中的通用同步異步收發器(USART)和在富士通微控制器中的UART是後者的兩個典型例子。
運用
通信領域
 usart0作為uart使用,提供異步
usart0作為uart使用,提供異步UART首先將接收到的並行數據轉換成串列數據來傳輸。訊息幀從一個低位起始位開始,後面是5~8個數據位,一個可用的奇偶位和一個或幾個高位停止位。接收器發現開始位時它就知道數據準備傳送,並嘗試與傳送器時鐘頻率同步。如果選擇了奇偶,UART就在數據位後面加上奇偶位。奇偶位可用來幫助錯誤校驗。
在接收過程中,UART從訊息幀中去掉起始位和結束位,對進來的位元組進行奇偶校驗,並將數據位元組從串列轉換成並行。UART也產生額外的信號來指示傳送和接收的狀態。例如,如果產生一個奇偶錯誤,UART就置位奇偶標誌。奇偶校驗位適用於檢驗傳輸是否正確的。
計算機
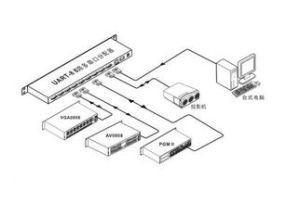
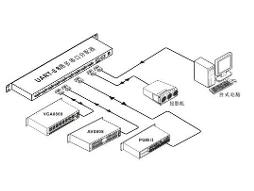
 cr-uart8 8路串口分配器
cr-uart8 8路串口分配器UART是計算機中串列通信連線埠的關鍵部分。在計算機中,UART相連於產生兼容RS232規範信號的電路。RS232標準定義邏輯“1”信號相對於地為-3到-15伏,而邏輯“0”相對於地為+3到+15伏。所以,當一個微控制器中的UART相連於PC時,它需要一個RS232驅動器來轉換電平。
Uart這裡指的是TTL電平的串口;RS232指的是RS232電平的串口。
TTL電平是5V的,而RS232是負邏輯電平,它定義+5~+12V為低電平,而-12~-5V為高電平。
Uart串口的RXD、TXD等一般直接與處理器晶片的引腳相連,而RS232串口的RXD、TXD等一般需要經過電平轉換(通常由Max232等晶片進行電平轉換)才能接到處理器晶片的引腳上,否則這么高的電壓很可能會把晶片燒壞。
我們平時所用的電腦的串口就是RS232的,當我們在做電路工作時,應該注意下外設的串口是Uart類型的還是RS232類型的,如果不匹配,應當找個轉換線(通常這根轉換線內有塊類似於Max232的晶片做電平轉換工作的),可不能盲目地將兩串口相連。
