
簡介
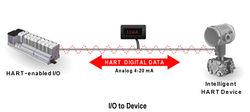
1、HART協定採用基於Bell202標準的FSK頻移鍵控信號,在低頻的4-20mA模擬信號上疊加幅度為0.5mA的音頻數位訊號進行雙向數字通訊,數據傳輸率為1.2kbps。由於FSK信號的平均值為0,不影響傳送給控制系統模擬信號的大小,保證了與現有模擬系統的兼容性。在HART協定通信中主要的變數和控制信息由4-20mA傳送,在需要的情況下,另外的測量、過程參數、設備組態、校準、診斷信息通過HART協定訪問。
HART通信採用的是半雙工的通信方式,其特點是在現有模擬信號傳輸線上實現數位訊號通信,屬於模擬系統向數字系統轉變過程中過渡性產品,因而在當前的過渡時期具有較強的市場競爭能力,得到了較快發展。HART 規定了一系列命令,按命令方式工作。它有三類命令,第一類稱為通用命令,這是所有設備都理解、都執行的命令;第二類稱為一般行為命令,所提供的功能可以在許多現場設備(儘管不是全部)中實現,這類命令包括最常用的的現場設備的功能庫;第三類稱為特殊設備命令,以便於工作在某些設備中實現特殊功能,這類命令既可以在基金會中開放使用,又可以為開發此命令的公司所獨有。在一個現場設備中通常可發現同時存在這三類命令。
HART採用統一的設備描述語言DDL。現場設備開發商採用這種標準語言來描述設備特性,由HART基金會負責登記管理這些設備描述並把它們編為設備描述字典,主設備運用DDL技術來理解這些設備的特性參數而不必為這些設備開發專用接口。但由於這種模擬數字混合信號制,導致難以開發出一種能滿足各公司要求的通信接口晶片。HART能利用匯流排供電,可滿足本質安全防爆要求,並可組成由手持編程器與管理系統主機作為主設備的雙主設備系統。
HART規範
HART協定於80年代後期開發,並於90年代初移交到HART基金會。從那時起,它已經更新了好幾次。每一次的協定更新都確保更新向後兼容以前的版本。HART協定當前的版本是7.3版。“7”表示主修訂號碼,而“3”表示次修訂號碼。
HART協定實現了開放系統互連(OSI)7層協定模型的第1、2、3、4和7層:
協定物理層
以貝爾202標準為基礎,採用頻移鍵控(FSK),以1200bps的速率通信。代表0和1位值的信號頻率分別為2200和1200Hz。該低電平信號疊加在4到20mA的模擬測量信號之上,而不會對模擬信號造成任何干擾。
數據鏈路層
定義了一項主從協定 - 在正常使用下,現場設備只在收到信號時才作回答。可以有兩個主設備,例如,控制系統作為第一主設備,而手持HART通信器作為第二主設備。時序規則定義每個主設備可以開始通信事務的時間。單個多點線纜對可以連線多達15個或更多的從設備。
網路層
提供路由、端到端安全及傳輸服務。它管理與通信設備之間端到端通信的“會話”。
傳輸層
數據鏈路層確保通信成功地從一個設備到另一個設備傳播。傳輸層可以被用來確保端到端通信的成功。
套用層
定義了協定所支持的命令、回響、數據類型和狀態報告。在套用層,協定的公共命令分為四大類:
通用命令 - 提供在所有現場設備都必須實現的功能
常用命令 - 提供很多設備所共有的功能,但並不是所有的現場設備都具有的功能
設備特定命令 - 提供某特定現場設備所特有的功能,由設備製造商所指定
設備系列命令 - 為特定測量類型的儀器提供一套標準化的功能,允許無需使用設備特定指令便能進行完全的通用性訪問。
1.通用命令 - 提供在所有現場設備都必須實現的功能
2.常用命令 - 提供很多設備所共有的功能,但並不是所有的現場設備都具有的功能
3.設備特定命令 - 提供某特定現場設備所特有的功能,由設備製造商所指定
4.設備系列命令 - 為特定測量類型的儀器提供一套標準化的功能,允許無需使用設備特定指令便能進行完全的通用性訪問。
通用命令
HART命令0:讀標識碼
返回擴展的設備類型代碼,版本和設備標識碼。
請求:無
回響:
位元組0: 254
位元組1: 製造商ID
位元組2: 製造商設備類型
位元組3: 請求的前導符數
位元組4: 通用命令文檔版本號
位元組5: 變送器規範版本號
位元組6: 設備軟體版本號
位元組7: 設備硬體版本號
位元組8: 設備標誌
位元組9-11: 設備ID號
HART命令1:讀主變數(PV)
以浮點類型返回主變數的值。
請求:無
回響:
位元組0: 主變數單位代碼
位元組1-4: 主變數
HART命令2:讀主變數電流值和百分比
讀主變數電流和百分比,主變數電流總是匹配設備的AO輸出電流。百分比沒有限制在0-100%之間,如果超過了主變數的範圍,會跟蹤到感測器的上下限。
請求:無
回響:
位元組0-3: 主變數電流,單位毫安
位元組4-7: 主變數量程百分比
HART命令3:讀動態變數和主變數電流
讀主變數電流和4個(最多)預先定義的動態變數,主變數電流總是匹配設備的AO輸出電流。每種設備類型都定義的第二、第三和第四變數,如第二變數是感測器溫度等。
請求:無
回響:
位元組0-3: 主變數電流,單位毫安
位元組4: 主變數單位代碼
位元組5-8: 主變數
位元組9: 第二變數單位代碼
位元組10-13:第二變數
位元組14: 第三變數單位代碼
位元組15-18:第三變數
位元組19: 第四變數單位代碼
位元組20-23:第四變數
HART命令4:保留
HART命令5:保留
HART命令6:寫POLLING地址
這是數據鏈路層管理命令。這個命令寫Polling地址到設備,該地址用於控制主變數AO輸出和提供設備標識。
只有當設備的Polling地址被設成0時,設備的主變數AO才能輸出,如果地址是1~15則AO處於不活動狀態也不回響套用過程,此時AO被設成最小;並設定傳輸狀態第三位——主變數模擬輸出固定;上限/下限報警無效。如果Polling地址被改回0,則主變數AO重新處於活動狀態,也能夠回響套用過程。
請求:
位元組0: 設備的Polling地址
回響:
位元組0: 設備的Polling地址
HART命令7:
HART命令8:
HART命令9:
HART命令10:
HART命令11:用設備的Tag讀設備的標識
這是一個數據鏈路層管理命令。這個命令返回符合該Tag的設備的擴展類型代碼、版本和設備標識碼。當收到設備的擴展地址或廣播地址時執行該命令。回響訊息中的擴展地址和請求的相同。
請求:
位元組0-5: 設備的Tag,ASCII碼
回響:
位元組0: 254
位元組1: 製造商ID代碼
位元組2: 製造商設備類型代碼
位元組3: 請求的前導符數
位元組4: 通用命令文檔版本號
位元組5: 變送器版本號
位元組6: 本設備的軟體版本號
位元組7: 本設備的硬體版本號
位元組8: 設備的Flags
位元組9-11: 設備的標識號
HART命令12:讀訊息(Message)
讀設備含有的訊息。
請求:無
回響:
位元組0-23: 設備訊息,ASCII
HART命名13:讀標籤Tag,描述符Description和日期Date
讀設備的Tag,Description and Date。
請求:無
回響:
位元組0-5: 標籤Tag,ASCII
位元組6-17: 描述符,ASCII
位元組18-20:日期,分別是日、月、年-1900
HART命令14:讀主變數感測器信息
讀主變數感測器序列號、感測器極限/最小精度(Span)單位代碼、主變數感測器上限、主變數感測器下限和感測器最小精度。感測器極限/最小精度(Span)單位和主變數的單位相同。
請求:無
回響:
位元組0-2: 主變數感測器序列號
位元組3: 主變數感測器上下限和最小精度單位代碼
位元組4-7: 主變數感測器上限
位元組8-11: 主變數感測器下限
位元組12-15:主變數最小精度
HART命令15:讀主變數輸出信息
讀主變數報警選擇代碼、主變數傳遞(Transfer)功能代碼、主變數量程單位代碼、主變數上限值、主變數下限值、主變數阻尼值、防寫代碼和主發行商代碼。
請求:無
回響:
位元組0: 主變數報警選擇代碼
位元組1: 主變數傳遞Transfer功能代碼
位元組2: 主變數上下量程值單位代碼
位元組3-6: 主變數上限值
位元組7-10: 主變數下限值
位元組11-14:主變數阻尼值,單位秒
位元組15: 防寫代碼
位元組16: 商標發行商代碼Private Label Distributor Code
HART命令16:讀最終裝配號
讀設備的最終裝配號。
請求:無
回響:
位元組0-2: 最終裝配號
HART命令17:寫訊息
寫訊息到設備。
請求:
位元組0-23: 設備訊息,ASCII
回響:
位元組0-23: 設備訊息,ASCII
HART命令18:寫標籤、描述符和日期
寫標籤、描述符和日期到設備。
請求:
位元組0-5: 標籤Tag,ASCII
位元組6-17: 描述符Descriptor,ASCII
位元組18-20:日期
回響:
位元組0-5: 標籤Tag,ASCII
位元組6-17: 描述符Descriptor,ASCII
位元組18-20:日期
HART命令19:寫最後裝配號
寫最後裝配號到設備。
請求:
位元組0-2: 最終裝配號
回響:
位元組0-2: 最終裝配號
工作方式
“HART”是高速可定址遠程感測器的縮寫。HART協定利用貝爾202頻移鍵控(FSK)標準,將低電平的數字通信信號疊加在4 - 20mA之上。
圖1. 頻移鍵控(FSK)
這項技術實現了雙向現場通信,並使得同智慧型現場儀表傳輸比一般過程變數更多的信息成為可能。HART協定以1200 bps的速率通信,而不影響4 - 20mA信號,並允許一個主機應用程式(主設備),從智慧型現場設備每秒獲取兩次或兩次以上的數字更新。由於數字FSK信號是相位連續的,因而不會對4 - 20mA信號造成干擾。
HART技術是個主/從協定,這意味著,只有當主設備發出信號時,智慧型現場(從)設備才會傳送信號。HART協定可在多種模式下使用,如點到點或者多點模式,在智慧型現場儀表和中央控制或監測系統之間傳輸信息。
HART通信發生在兩個具有HART功能的設備之間,通常是智慧型現場設備和控制或監測系統之間。通信使用標準的儀器級電纜,並且使用標準的接線和終端處理方式。
HART協定提供兩個同步通信通道:4 - 20mA模擬信號和一個數位訊號。4 - 20mA信號利用4 - 20mA的電流迴路 – 它是最快和最可靠的業界標準,來傳輸主要的測量值(在現場儀表的情況下)。另外,HART利用疊加在模擬信號之上的數位訊號,來傳輸其它的設備信息。
數位訊號中包含了來自設備的信息,包括設備狀態、診斷、額外的測量或計算值等。這兩個通信通道結合起來,提供了一種易於使用和配置的低成本、高度可靠的、完整的現場通信解決方案。
 HART協定
HART協定圖2. 兩個通信通道
HART協定最多可有兩個主設備(第一主設備和第二主設備)。這使得可以利用第二主設備,例如手持通信器,而不會對第一主設備,如控制/監測系統的通信造成干擾。
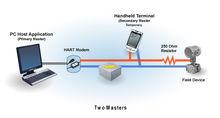 HART協定
HART協定圖3. 第一和第二主方
HART協定允許與現場設備之間的所有數字通信,可採用點到點或多點模式的網路配置:
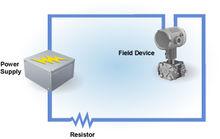 HART協定
HART協定圖4. 點到點的配置
多點模式的配置
還有一個可選的“猝發”通信模式,其中單個從設備可連續廣播標準的HART回覆信息。這一可選的“猝發”通信模式有可能採用更高的更新速率,並且使用通常只限於點到點的配置。
 HART協定
HART協定圖5. 多點配置
通信優勢
在模擬信號環境中工作的自動化工程師經常會說,“要是我不去現場,就能獲得設備信息的話…”或者“要是我能將那個壓力變送器的這項配置信息存入我的電腦的話…”。有了HART,他們就不再需要說出“要是”這樣的話了。世界各地已經認識到HART通信優勢,當使用具有HART功能的手持式測試、校準設備和攜帶型電腦時,他們在現場就能便捷地獲取設備的信息。事實上,設備的測試、診斷和配置從未變得如此的簡單!
然而,許多人尚未認識到HART技術的最大優勢 ,這些優勢來自與實時的資產管理和/或控制系統的全天候連線。
HART技術可以幫助您:
•利用整套智慧型設備數據的能力,來提升運營能力。對設備、產品或工藝性能出現變化進行早期預警。
•縮短發現到解決問題的故障排除時間。
•不斷驗證迴路和控制/自動化系統策略的完整性。
•提高資產效率和系統可用性。
提高工廠的可用性
•將設備和系統集成起來,以檢測先前檢測不到的問題。
•實時檢測設備和/或過程的連線問題。
•通過獲取新的早期預警,以減少偏差造成的影響。
•避免非計畫停機或過程中斷所引起的高成本。
降低維護成本
•快速確定和驗證控制迴路和設備配置。
•使用遠程診斷,以減少不必要的現場檢查。
•捕獲性能趨勢數據,以進行預測性維護診斷。
•減少備件庫存和設備管理成本。
