
內容摘要:
關鍵字:實時性、直接交叉通信、冗餘技術、安全技術、時隙管理、多路復用、主從結構、NMT、SDO、PDO
Ethernet POWERLINK巨觀理解
1.1 POWERLINK=CANopen+Ethernet
鑒於乙太網的蓬勃發展和CANopen在自動化領域裡的廣闊套用基礎,EthernetPOWERLINK 融合了這兩項技術的優點和缺點,即擁有了Ethernet的高速、開放性接口,以及CANopen在工業領域良好的SDO 和PDO 數據定義,在某種意義上說POWERLINK就是Ethernet 上的CANopen,物理層、數據鏈路層使用了Ethernet介質,而套用層則保留了原有的SDO 和PDO對象字典的結構,這樣的好處在於:
- POWERLINK 無需做較多的改動即可實現;
-保護原有投資的利益;
-開放性的接口;
1.2 遵循ISO模型
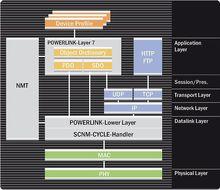 ISO模型
ISO模型由右圖可知,MAC 層和PHY 均是標準的乙太網,在數據鏈路層POWERLINK 做了修改和調整,並在處理器中運行了POWERLINK SCNM 循環控制的協定棧,由NMT 對網路狀態進行管理,POWERLINK 狀態包括啟動、運行、停止、等待多個狀態,NMT 負責對網路的設備進行管理,SDO 和PDO 分別作為網路配置與實時數據的接口,由套用軟體提供與之匹配的數據接口,此依據CANopen的SDO 和PDO 對象字典來實現。
1.3 軟體解決方案
POWERLINK只是在數據鏈路層進行了調整和修改,是基於標準硬體,並且與標準乙太網完全兼容的軟體解決方案。
1.4 實時的確定性乙太網
在技術方面採用了SCNM時間槽通信管理機制,由此能夠準確預測數據通訊的時間,從而實現了實時通訊的確定性。
1.5 面向所有系統
 面向所有系統
面向所有系統如右圖所示,POWERLINK適用於PLC,感測器,I/O模組、運動控制、安全控制、安全感測器、執行機構以及HMI系統等。
Ethernet POWERLINK性能
-100Mbps傳輸速度-未來提供10Ghz乙太網技術
-刷新周期(最小100uS)
-抖動<<1uS
-傳輸距離:100m/節點間距
-支持任意網路拓撲結構
-實時作業系統非必要
-輪詢方式,支持Client/Server和Producer/Consumer模式
- M12 & RJ45連線頭
- IEEE802.3標準乙太網介質傳輸
-支持光纖連線
-最大每隔網段支持253個節點
Ethernet POWERLINK原理
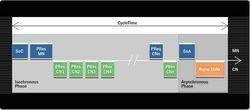
3.1 等時同步機制
 等時同步
等時同步POWERLINK的時間槽管理機制反應POWERLINK的整個控制機制(如右圖所示)。
在這個過程中,遵循IEEE1588分散式時鐘系統標準,每個設備都將帶上時鐘以確保數據交換中的時鐘同步,POWERLINK的循環周期由兩個Master即管理節點MN和CN(Controlled Node)也稱為從站Slave構成,在上電後,POWERLINK主站發布配置信息給每個從節點,然後發布SoC同步開始幀,每個從節點接收到SoC後開始進入數據通信等待狀態,在SoC後,MN傳送PReq1到第一個節點,Preq1收到後傳送PRs1到網路上並以廣播形式發布,然後MN 傳送PReq2給第二個節點,然後第二個節點傳送PRs2給網路,如此序列將到PRsN後結束,MN再傳送SoA代表異步通信階段開始,異步數據在這個SoA後開始傳送到網路,整個過程稱為一個POWERLINK循環幀,它由等時同步階段和異步階段構成,這些均可配置時間。
3.2 多路復用機制
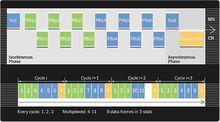 多路復用
多路復用為了提升網路效率,POWERLINK採用了多路復用機制來處理節點數較大的情況,通過網路配置,將系統設備劃分為快速設備與慢速設備,對於快速設備可以在每個等時同步階段進行數據刷新,而對於慢速設備可以每隔1~N個周期進行刷新。這樣,即可縮短整個系統在每隔POWERLINK周期里的時間槽數,即使對於大量套用的節點也可以通過此種最佳化方式來提高整體的效率,因此,從這個角度來說,POWERLINK是非常具有靈活性和實用性的。
PRC技術
(PRC-Poll Request Chianing Technology -輪詢序列技術)
 PRC技術
PRC技術原有的POWERLINK輪詢過程是SoC對表,MN傳送Preq請求CN1~CNn,每個CN接受到請求後則Pres回響並廣播數據到網路上,這個過程里存在的問題在的問題在於Preq和Pres的反覆握手過程,而PRC技術則取消了這個握手,在Preq後每個節點不再握手而直接進行數據傳送,這是因為每個節點都帶有分散式時鐘。
經過此種方式,整個POWERLINK網路的傳輸效率提高至少40%,對於80個POWERLINK節點(其中伺服軸為40個,I/O站為40個,包含1000個I/O通道)的測試結果為800uS。
Ethernet POWERLINK功能
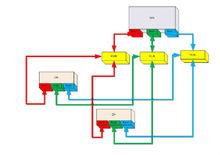
4.1 直接交叉通信
交叉通信意味著控制節點之間可以交換數據,而無需通過主站(Master)。
同標準乙太網的設備一樣,POWERLINK上的節點遵循Producer/Consumer機制,在網路上廣播數據。通過檢測數據幀地址,節點判斷它們是否應該予以回應。如果給出一個適合的配置,控制節點也可以理解其它節點返回的命令。交叉通信的數據可以被控制器管理的節點同步。這種柔性是使得它領先其它的Master/Slave概念,可以實現大型模組化機器設計的網路要求。在很多模組內部,或多或少存在節點間的單獨通信,這是模組的一部分。每一個模組都有一個節點,負責調整模組內的通信,以及和其他模組的通信。然而,在系統里這些“模組主站”――PLCs或I/O設備,普遍只被看作控制節點。因此,這些模組基本上可以自行運行,而管理節點主要負責網路管理和模組間的同步。另外,用戶可能已經感受到交叉通信的好處了,即使在不複雜的套用中。例如,在印刷機中,所有驅動器的旋轉編碼器都與一個主編碼器同步,這是一個簡單且有效的方法,無需分散式時鐘或其他工具。
交叉通信的好處在於省時,系統簡單,控制任務少,在很多場合,它允許使用更經濟的控制器。它的好處在於:
l 中央和非中央控制設計(集中或分散式控制設計)
l 控制器-控制器通信
l 主軸直接給從軸設定值
l 編碼器值的直接傳遞
l 直接事件傳播
l 減少主站負載或者套用負載
l 多種模式,最小的數據負載
l 具有分散式安全設計能力
4.2 POWERLINK Safety
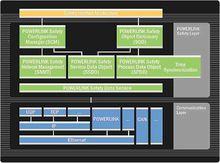 POWERLINKSaftey
POWERLINKSafteyPOWERLINK Safety 是滿足IEC61508的SIL3和PLe等級的機器安全網路。
POWERLINK使用了SCM來與套用軟體進行接口,以接收來自控制系統對於網路的配置與參數的上傳下載,而通過SOD來實現數據對象字典的接口,與套用進行接口,傳輸SPDO這種實時性要求較高的安全數據,而SSDO則是服務數據可以通過異步階段進?行傳輸。SNMT則對網路狀態進行監控,與POWERLINKNMT不同的是,SNMT增加了一個新的狀態來延伸系統的能力。
4.3 開放的診斷工具
 診斷工具
診斷工具POWERLINK可以使用開放的Ethernet診斷工具如Wireshark以及CANopen的配置工具,另外,由EPSG 組織同時提供開源的openConfigurator來進行網路的配置,這些都使得使用POWERLINK技術的廠商無需再額外的開發特殊的配置與診斷工具。
4.4 冗餘支持能力
Powerlink並非由一家公司來完成的,其中POWERLINK的冗餘設計最大的貢獻來自於Alstom,這家公司是在電力與交通領域的大型跨國企業,他們在研發其電力系統時選擇了POWERLINK作為其高可用性網路的設計。
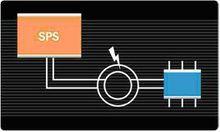
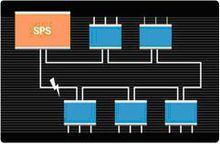 介質冗餘
介質冗餘Alstom 冗餘模式是按照如下設計的:兩個或更多的冗餘管理節點(RMN)在網路層次的頂端,只有一個作為主動管理節點AMN,其?它保持Stand-by(SMN)狀態並扮演一個受控節點。SMN和CN的唯一不同在於SMN持續的監控所有網路及CN功能,在緊急情況下,這能使得SMN具有AMB功能作為網路內的一個RMN,每個RMN必須能夠配置所有網路設備,其它RMN也不例外。這個冗餘模式允許一個大範圍的拓撲方式。RMN可以通過HUB 訪問一個簡單的網路層,一個可行的設計是將RMN和CN放在一個環形內,封閉了網路結構內,第三個對阿爾斯通有利的方面包括冗餘數據線,能夠保護匯流排不僅在MN失效,而且在匯流排電纜失效和故障的情況下運行。
網路管理狀態
 環形冗餘
環形冗餘阿爾斯通的開發者們必須進行很多針對網路狀態的改變,以能夠使得系統集成多個冗餘管理站,由於POWERLINK最初只允許對一個MN進行操作,網路管理站NMT是一個基於CAN Open的監測及控制服務。每個網路設備有一個NMT狀態機器,這可以提供從MN的NMT主站獲得請求及操作狀態信息,定義了四個狀態分別是,初始化,預操作,可操作和停止,在初始化階段,不允許設備啟動並且激活網路,在預操作階段,設備對網路參數進行同步,但是還不能開始傳輸數據,可操作表示單元完全可操作的,停止意味著設備從網路斷開,只接受一個NMT指令,為了冗餘操作,MN可以在任何時候承擔控制功能,編程者增加一個第五狀態(StandBy)給NMT狀態機器,在預操作階段,RMN檢查匯流排狀態,如果沒有相關的信號被偵測到,它就切換到激活模式,並且扮演一個AMN功能,如果RMN檢測到網路活動,它就會在操作模式切換到等待模式,但是將會以一個標準CN進入系統。
連線選擇器
除了堆疊更換,阿爾斯通的專家們開發了連線選擇器,這個創新使得網路能夠對冗餘數據線進行操作。與HUB相似,它連線了數據行輸入和受控節點,扮演了一個關聯操作者的角色,並且將信號輸送線與CN相連,如果一個線路中斷,開關切換到另一個。電纜斷掉也能通過連線選擇器傳送信息來定位。
套用
在完成所有模式及技術開發後,阿爾斯通進入一個仿真階段,在阿爾斯通的工業化安裝中,系統是否能夠適應特殊過程必須通過基於計算機模式進行驗證。重中之重,仿真確定我們的初步估計,這展現了100Mbps乙太網足以滿足數據負載的要求。結果是,我們創造了豐富的特殊過程,並測試了在這些情況下的系統功能,Potier描述了這個漫長的仿真階段,我們不能在確認之前投入操作,除非它如我們所願的那樣工作。
由於 POWERLINK通常設計為雙口Hub的形式在控制器、驅動器上,那么就可以採用一進一出的方式進行連線,將末位的一個重新連線回到第一個主站構成一個環形通信冗餘,這樣即使產生網路的中斷,那么,系統仍然可以重新自動配置網路成為一個線性的網路來進行數據傳輸,總有一條路是可以給你選的。
4.5 多主冗餘
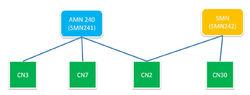
冗餘主站 RMN(Redundant Managing Node)在PowerLINK網路中表現為兩種狀態,即StandBy和 Active。在任意時刻,全網中只能有一個RMN處於Active狀態,其他的RMN都必須保持在StandBy狀態,並保持監聽,以便在出現故障時隨時接管網路。
 Ethernet POWERLINK
Ethernet POWERLINK在傳統的單主網路中,MN的節點號被固定為240,而在一個多主環境中,每個RMN都有自己獨立的節點號,當其處於StandBy狀態時,使用其自身節點號來進行監聽和通信,而當處於Active狀態時則採用節點號240來傳送控制信息,採用自身節點號來傳送PRes。
對於一個RMN,要實現以下基本功能:
•採用一個基於優先權的接管機制,選擇最合適(接管最快)的RMN來接管網路;
•確保接管的前後,網路上的所有節點的工作狀態不受影響;
•確保全網的時間同步,即SoC的時間戳同步。
另外,在整個網路初始化時,可以選定某一特定RMN作為初始的Active MN,並由該節點將整個網路的CN配置列表傳送給其他的RMN。
 Ethernet POWERLINK
Ethernet POWERLINK完整的冗餘主站應當具有以下功能
·標準主站
·標準從站
·實時數據備份
·CFM配置
·命令切換
·碰撞檢測退避
·AP可控
4.6 介質冗餘
在POWERLINK實時工業乙太網中,為了實現網路健壯性,採用雙網或三網冗餘設計。即在這雙網或三個網路中同時收發相同的數據,其中任意一條網路都可以被認為是主通訊線路,而其他網路是這條主通訊線路的備份。當主通訊線路不暢時,備份通路仍然可以通訊,從而保證網路健壯性。設計中保持MAC層以上的網路結構不變,只針對介質層進行冗餘設計,即在PHY上來的數據進行冗餘設計。
 Ethernet POWERLINK
Ethernet POWERLINK例如:在三網介質冗餘中,MAC對每路的數據都是一個3連線埠的HUB對數據進行轉發,這意味著一個口進數據,另兩個口對數據進行轉發(轉發的一個口數據給MAC、另一個口數據被轉發到下一個節點)。而對上到MAC的三路數據選擇最優數據(質量好的數據,可以用CRC來進行判斷)最終給到MAC。
Ethernet POWERLINK技術實現
作為 openSource Techonology,POWERLINK技術可以提供給各個自動化組件製造商來使用,任何加入EthernetPOWERLINK組織的成員、個人均可使用此openSource技術,獲得原始碼並據自己實際開發其自身套用。
5.1 FPGA從站 實現
 FPGA從站方案
FPGA從站方案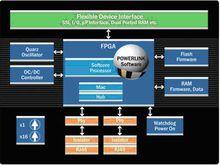 FPGA從站設計框架
FPGA從站設計框架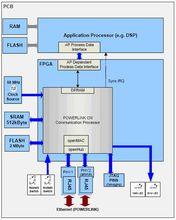 FPGA從站硬體參考電路
FPGA從站硬體參考電路與其它的實時匯流排基於ASIC不同,POWERLINK可採用通用的晶片來實現,如ARM,FPGA,多協定晶片如Hilscher的Net X晶片,以及龍芯等,相較而言,基於FPGA的實現可以實現更高的實時性能,例如ALTERA和XILINX的通用FPGA晶片即可,基於FPGA可以達到200uS的系統刷新能力,因此FPGA為主推的POWERLINK實現。
5.2 主站實現
 POWERLINK主站實現
POWERLINK主站實現POWERLINK是一個軟協定,可以運行在各種作業系統平台上,也可以直接運行在標準PC上即可,下圖即顯示了一個標準PC上的POWERLINK主站,可以訪問B&R X20分散式I/O系統,也可以訪問其它POWERLINK從站如感測器和變頻器設備。這是POWERLINK最簡單的實現方法,但是,這個方法下依賴於平台,如WindowsCE Embedded、RT-Linux,相對而言,這些套用的刷新周期要在mS級,RT-Linux可實現較快的速度,但是要根據系統的裁剪而定,也可以達到uS級的周期時間。
Ethernet POWERLINK套用前景
6.1.CNC 與機器人
在機器人系統中,為了實現機器人動作的變化,需要對其進行路徑規劃的算法設計,由於機器人的各個關節的機械參數的不同,例如各機械臂長度,工作範圍限制,機械當前位置的差異,路徑規劃需要確保機械執行能夠具有最快的到達指定位置,而又每個軸具有較低的機械振動,並且在運行過程中及時反饋當前信息,以為下一步的執行提供參考,這一運動過程需要高速的數據通信來建立軸與軸之間的位置關係的綁定,這對通信提出了更高的要求,實時通信在機器人系統里得到了最為現實的套用。
同樣的道理,CNC系統的工作是將插補信息通過匯流排傳遞給每個伺服軸,在整個CNC系統里,由於精度、速度和時間具有如下的關係:
dS=dv*dt
位置的精度=速度的變化*時間
而為了保證高精度和高速,則dt值將需要足夠小,這是為什麼在CNC系統里需要更高的通信速度的原因,另外一個值得注意的是,傳統的CNC系統的速度環控制往往運行在主CPU上,反饋元件如編碼器數據回到CNC上位系統,使得對於CNC系統而言,除了計算插補,也要計算速度和位置環,這使得對於高速系統達到uS級的刷新要求,在專用的系統里這一速度甚至達到31.625uS或62.5uS,由於智慧型型伺服驅動器的出現,速度與位置環的計算可以在分散式伺服本地執行,使得這一對匯流排的需求降低,但是,仍然要達到百微秒級的刷新要求。
6.2 高速多軸系統套用
隨著無軸傳動技術的使用,在產業機械的各個領域如包裝、印刷、紡織、塑膠等領域,為了降低傳統的機械長軸通過蝸輪蝸桿方式傳遞所帶來的機械磨損造成的偏差,以及為了更為靈活的工藝切換,無軸傳動技術得到了更為廣泛的套用,這些系統為了實現各個運動軸之間的高速同步,需要由一個高速匯流排來實現各個軸之間的速度與位置關係按照一個工藝需求的曲線或同步關係來執行,通常這一需求在百微秒級,這需要與伺服系統的位置環相匹配,目前智慧型型的伺服系統的位置環計算已經達到400uS甚至更低的周期時間,這也使得通信必須在這個級別上與之匹配。
可以套用領域包括:
l 印刷機械無軸傳動系統
l 啤酒飲料灌裝系統
l 全電動注塑成型與中空成型系統
l 流延膜生產線
l 化纖設備高速卷繞
l 棉紡粗紗、細紗機
l 嬰兒/成人紙尿褲生產線
l 輪胎成型與裁斷系統
l 單晶矽/多晶矽多線切割機
l ……
這些高速的套用系統里,Ethernet POWERLINK的優越性已經體現無疑,並在繼續延伸其在多軸高速運動控制系統的套用領域。
6.3 航空與高鐵測試系統的時序分析
除了機器人與機械系統高速同步需求外,高速測試系統對於數據交換的確定性提出了要求,為了確保在系統故障時對於各個子系統和感測器等數據的時序進行分析,以使得工程師可以分析導致系統故障的各個原因,需要對於數據的確定性得到保障,這也是實時乙太網的最關鍵套用,EthernetPOWERLINK由於採用了滿足IEEE1588時鐘系統設計,並且每個系統刷新過程都需要精確對時並給每個數據包打上時間戳,通過測試軟體可以監控到每個數據包的傳送時序,從而為系統診斷與調試提供可靠的數據分析基礎。
機載測試系統
高鐵信號採樣系統
6.4 安全(Safety)套用
POWERLINKsafety是經過TUV認證的滿足IEC61508標準和並且成為IEC61784-3標準,這使得它成為具有經過嚴格認證的安全技術標準,由於其獨特的雙CRC校驗設計,使得其在保證數據交換的完整性方面優勢突出。帶有時間戳的數據包確保了數據重複、插入與時序混亂的產生,所有安全相關數據均在實時監控之下,類似一個看門狗的設計保證了數據不被丟失和延遲,獨特的幀設計保證其不會造成安全幀與其他數據幀產生混亂。
在未來,安全技術將會成為關注的重點,一方面,人性化的系統設計要保護人的生命與免除機械傷害,而另一方面保護機器的設備投資也變得更加重要,在以下領域裡Safety技術將發揮更大的效能:
l 汽車生產與製造;
l 輪胎生產線;
l 具有裁切裝置的機械設備如印刷後道、捲筒紙切紙機構;
l 風力發電機組;
l 塑膠機械;
l 啤酒飲料灌裝系統;
l 紡織機械如經編機、碳纖維卷繞;
l 物流輸送系統;
l 大型鍛壓與鑄造設備;
l 數控工具機
l ……
Ethernet POWERLINK未來發展
POWERLINK的未來基於標準乙太網技術的發展,而標準乙太網的發展是全世界所有資源貢獻的結果,所以POWERLINK的發展不依賴於其自身,而是世界資源的整合,發展無限量。隨著Gbps/10Gbps乙太網技術蓬勃發展,POWERLINK亦緊跟其腳步,向Gbps/10Gbps深入。
Ethernet POWERLINK中國用戶組織
Ethernet POWERLINK中國用戶組織由貝加萊、上海工業自動化儀表所、步進科技、山東大學、廣東工業大學、赫優訊等國內的知名自動化廠商、研究機構、大學共同發起組織的非盈利性組織,其旨在推廣這項前沿實時通信技術到中國自動化組件廠商,提供技術諮詢、支持和研究的技術性活動,以及市場推廣的各種展會、研討會、學術交流會的組織。每個參與者都將成為“Ethernet POWERLINK”這個原始碼開放、純軟體實現、免專利費的技術的“共同持有者”,並受益其中。
中國用戶組織機構為成員共同發起,並規劃為理事會結構,成員代表大會為最高決策機構。成員代表大會下設理事會,由理事長與若干副理事長組成,負責組織的發展方向和決策並向成員代表大會匯報,理事會設秘書處,協調組織日常事務工作,召集會議並傳達落實成員代表大會檔案和負責日常事務的溝通,同時設有技術支持組、市場推廣組、預算組來具體執行組織的日常技術支持、市場宣傳與推廣、預算使用情況,並向理事長匯報,在每年召集的成員代表大會上理事長向全體成員匯報組織的工作開展和未來的工作計畫。
冗餘主站功能
