目視飛行下飛機軌跡控制
相關定義
目視間隔定義:在氣象條件許可的情況下,通過航空器機長之間相互能見,或管制員能見航空器來確保航空器間安全運行的一種間隔類型,目視間隔適用於IFR和UFR飛行計畫的航空器。目視間隔是確保飛行安全的一種方法,可適用於飛行高度FL180(不含)以下的航路、終端和塔台管制區。當航空器駕駛員能見另一航空器,並表明願意接受目視間隔時,目視間隔的實質是將間隔責任委託給航空器駕駛員。建立目視間隔前,雷達管制員必須通過雷達給駕駛員必要的交通諮詢,如相關航空器的方位和距離,以便航空器駕駛員目視判明目標。
目視進近定義:當部分或全部儀表進近程式尚未完成時,空中交通管制部門允許IFR飛行計畫的航空器駕駛員保持目視飛向目的機場。由於它不是儀表進近程式,因此不設復飛航段。目視進近可由管制員發起或飛行員主動提出。
相關規定
美國聯邦航空局規章《A eronautical In form anonM anual》規定,實施目視進近的最低氣象條件為:雲底高大於1000英尺,能見度大於3標準英里。
FA A 7110.65 (A it TrafficControl)規定雷達管制員引導航空器準備進行目視進近最低氣象標準為:著陸機場的雲底高大於最低雷達引導高度(M VA ) 500英尺以上,能見度大於3海里。上述標準為最低標準,美國的管制部門通常根據實際運行的需要調高最低標準。
典型事件
以下是某機組駕駛A 320飛機執行三亞航班在三亞機場目視起落航線的過程描述:該航班以2400m過W L導航台,塔台指揮1200 m過K台(本場的西近台),上空後加入26號起落航線,機組保持目視後飛向上空,高度為1650 m (5400 FT)過上空,並設定了形態2。由於高度過高,機組保持航向飛出3N M以後左轉加入三邊,進入三轉彎時高度仍然偏高,飛機完全進入四邊後高度仍有600 m(2000 FT),機組開始頂桿,產生1500FT/MIN的下降率。記錄到一起低空大下降率的事件。進入起落航線後,該機組的操作和FCOM上偏離較為明顯PF繼續保持該下降率,以小坡度轉彎切入五邊,在距跑道入口3.4N M處,高度1000E T,但仍然保持1500E T下降率,繼續記錄到第二起低空大下降率事件。最後當穩定在五邊航跡上400E T時記錄到一起低下降角度的不安全事件。
事件分析
三亞26號目視起落航線屬於D類空域即塔台管制區域,儀表飛行的飛機在符合目視飛行規則的條件下,經飛行員申請、管制員批准並接受空中交通管制服務才可以按照目視規則飛行。不同於國外非管制機場的加入起落航執行緒序,所有國內機場加入起落航線需要得到管制許可並沿其規定的航線加入。所以如果申請目視進近,一定要事先了解機場的管制程式。三亞機場北靠山區、南臨大海,在進場時通常指揮2400 m過W L導航台,然後飛向本場西近台K,在出航W L台約13 km處,由於受到機場磁方位348度,距離8250 m,標高為793 m的障礙物(黃廉嶺)影響,此處飛行高度一般限制在1500 m,然後管制指揮下1200 m過K台,過K台或本場上空後下450 m或600 m左轉加入26號左三邊。由於國內暫時沒有發布過目視進近圖,機組在執行目視進近時除了要時刻保持機場以及同一區域內飛機活動目視外並需要對區域內地形地貌有致的了解。該機場曾發生過某航空公司的飛機在做目視起落時錯把三亞海軍機場當成鳳凰機場而準備落地,後得到塔台的及時提醒而拉升復飛。當我們在做起落航線時,根據大致的起落航線和海軍機場的方位關係,三亞海軍機場是一個較好的判斷三轉彎及四轉彎時機的地標。其16號跑道延長線和鳳凰機場三邊的交點是大致的三轉彎點,其0'號跑道延長線和鳳凰機場的四邊交點是大致的四轉彎點。在四轉彎時,五邊的北側障礙物較多,有些機組提前切入五邊以防止受到地形的影響。然而從地形圖上來看,該處障礙物在五邊北側約1 NM之外,也在該非精密進近跑道的進近面、錐形面一障礙物控制面之外,符合目視進近的跑道的淨空要求,在四邊時正常轉彎下高度完全處於保護區域之內。但是,五邊約5 NM的障礙物(抱坡嶺)卻要求機組不能把五邊做的太長,220 m的標高對飛行影響較大,塔台也提醒過機組注意五邊長度。
分析結果
從上面的分析我們可以看到,在W L點下降前如果管理好飛機的能量,嚴格從K台飛越加入26號的左三邊,並按照FCOM中對目視進近的要求執行目視進近是可以在正常的飛機狀態下完成安全落地。但是整個起落航線可能會是一個連續下降的過程。另外,如果機長預期無法執行目視進近,機長有責任向管制部門儘快告之。同時,目視進近不是儀表進近程式,不包含儀表程式中的復飛部分,如果在起落航線中需要復飛,應立即向塔台報告並要求管制服務。
綜上所述,該起事件中軌跡不穩定的原因是未管理好飛機的能量,導致飛機無法完成安全落地,其中人為因素占據很大的部分,為了避免類似事故發生,應該合理確定目視間隔和嚴格按照目視進近操作規定執行。
艦載飛機著艦下滑軌跡控制
艦載飛機是以航空母艦為基地的作戰機種,因此,要求它必須滿足和適應航空母艦的工作環境、自然環境和作戰環境,當然也就需解決艦載飛機與航空母艦環境的適配性問題。
海上的自然環境比陸地複雜和惡劣,飛機在航空母艦上著艦時存在比較大的外界干擾(如大氣紊流、甲板風及航空母艦擾流等)。要使飛機準確、安全地在航空母艦上著艦,除在航空母艦上配置有自動著艦系統(ACLS )、光學或微波助降系統及甲板運動補償系統(DMC)外,還要求飛機有較好的下滑軌跡保持能力。因此,艦載飛機上一般都設定有自動飛行控制系統(AFCS )。同時,艦載飛機上還設定有進場功率補償器系統(APCS ),以改善甚至消除速度不穩定現象,提高下滑軌跡精度。
飛行軌跡控制
飛機在著艦下滑的最後階段,為了跟蹤母艦這個活動的目標並準確地在甲板上著艦,保持高精度的下滑軌跡是極為重要的。然而,由於海面大氣素流和艦尾流的存在,外界干擾可能極為強烈,飛機很容易偏離預定的下滑軌跡,且此時飛機著艦速度一般都比較低,需安較大的飛行迎角,飛行的迎角如果超過了升阻極曲線上最大升阻比點所對應的迎角。在推力不變的情況下飛機將進入速度不穩定區。艦載飛機在著艦下滑段一般都超過這個迎角,從而使軌跡的保持較為困難。進場功率補償器系統的作用就在於根據飛行狀態量的反饋通過操縱飛機的舵面(平尾)和油門(改變推力)來克服這些外界干擾並對速度進行濾波,維待飛機在這一階段飛行的速度、迎角以及俯仰角近似為常數,以達到保持下滑軌跡的目的。
控制反饋量
在APCS系統的各反饋環節中,理論上可以將所有狀態向量的偏差都進行反饋,實際上由於有的狀態量不易感受和測量,同時,有的狀態量也沒有必要進行反饋。在APCS中一般反饋以下幾種狀態量:
a.迎角偏差反饋
迎角偏差反饋環節的增益為Ka,它主要用以調整Da和La。這個反饋對短周期模態有明顯影響,而對長周期沉浮模態的頻率和阻尼影響不大。
b.速度偏差反饋
速度偏差反饋環節的增益為Kv,它將增大長周期的沉浮模態的阻尼,從而改善飛行軌跡的穩定性。另一方面,它會降低Lv的值,使得長周期模態頻率有所下降。
c.過載偏差反饋
過載偏差反饋環節的增益為Knz,這個反饋混合了迎角和速度反饋的效應。
d.迎角偏差的積分反饋
迎角偏差的積分反饋環節的增益為K戶,在APCS系統中用這一反饋來消除靜態誤差,提供一種穩態濾波,達到維持迎角近似為常數的目的。這個反饋傾向於增加長周期模態的頻率和降低該模態的阻尼。
e.俯仰姿態反饋
俯仰姿態反饋環節的增益為Ka,這個反饋用來調整推力以克服重力在軌跡方向上的投影分量。
f.平尾操縱量反饋
平尾操縱量反饋環節的增益為Kdt,此反饋控制用來調節推力以克服平尾偏轉本身帶來的阻力增量。
飛行軌跡控制系統
用APCS系統來改善飛機的飛行軌跡回響是很有用的,它與飛機的基本特性有關,尤其是與飛機的升阻比以及發動機時間延遲回響有關。分析中認為發動機推力對升力和力矩的貢獻為零。
研究兩種改善軌跡的方法,一種是俯仰姿態控制,另一種是油門桿控制。兩者都與APCS系統有關。
APCS系統的目的在於維持飛行速度為所希望的值。當飛行軌跡改變時,為了維持速度近似為常數,必須調整推力來克服重力在飛行軌跡上的投影分量,這可用△θ對油門偏度的反饋環節來實現。其增益為:
 飛機飛行軌跡控制
飛機飛行軌跡控制速度反饋是用來控制推力從而使飛機軌跡穩定性達到適當的水平。其增益為:
 飛機飛行軌跡控制
飛機飛行軌跡控制圖中給出了一種簡化的APCS系統原理圖。
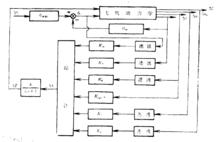 一種簡化的APCS系統原理圖
一種簡化的APCS系統原理圖