
基本概念
要對飛機的姿態進行控制,首先需要明確飛機的姿態是如何定義的,以及飛機的動力學模型是如何建立的,才能對飛機的姿態進行控制。需要說明的一點是,按照航空航天領域的定義,本文中的飛機指的是固定翼飛機 。
歐拉角
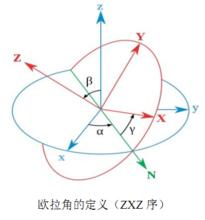
歐拉角是用以描述剛體圍繞定點旋轉的獨立角參量,基本定義是由章動角θ、進動角ψ和自轉角φ組成,分別表示OZ到oz軸的旋轉角、OX到垂直於OZz平面的節線ON的旋轉角、ON到ox的旋轉角。
 飛機橫滾控制
飛機橫滾控制在航空航天科學中,因為飛機會不斷的變換姿態,所以需要一個或一組量來描述飛機相對於地面坐標系(地球坐標系)的姿態;實際運用中,使用歐拉角來描述飛機的姿態。
姿態解算
為了建立飛機的動力學模型,需要明確飛機坐標系和地面坐標系之間的歐拉角關係,以便將不同的力物理量或運動物理量轉換到同一坐標系內進行運算。這個轉換的過程就叫姿態解算。
PRY姿態
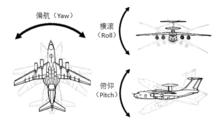
PRY姿態是Pitch-Roll-Yaw姿態的簡稱,對應飛機的俯仰、翻滾和偏航動作,三個動作的示意如下圖所示。
 飛機橫滾控制
飛機橫滾控制姿態控制
對飛機的三個姿態(俯仰、橫滾和偏航)進行控制統稱為姿態控制,控制飛機的姿態是保證飛機平穩飛行的關鍵;對於旋翼機,姿態控制是促使飛行器移動的根本。
飛機橫滾控制
顧名思義,對飛機的橫滾動作進行控制就是飛機橫滾控制;飛機橫滾控制是飛機姿態控制的一部分。
模型分析
想要對飛機建立完善的控制體系,就需要對飛機的動力學模型進行分析,得到促使飛機調整姿態和移動的物理量,並間接找到我們可以直接控制的控制量。
對不同類型的飛行器,動力學模型也是不同的,在此不展開討論,只簡要分析一下。
對於固定翼飛機來說,無論是由前置螺旋槳驅動還是後置引擎驅動,都是依靠一定飛行速度下由空氣動力學效應對機翼產生的升力來達到飛行的效果的;
對於單旋翼飛行器,即我們熟悉的常規直升機,是依靠姿態的改變使旋翼的產生的升力的方向改變;
對於多旋翼飛行器,如最常見的四軸飛行器,也是依靠姿態的改變產生位移的,只是在受力分析時和單旋翼有些不同。
飛行控制
對飛機的控制主要是速度和姿態的控制,一定的飛行速度加上合適的姿態就可以實現飛機的飛行和轉向。
飛機橫滾控制屬於姿態控制,一般使用的是典型的反饋控制方式,將飛機的坐標(包括高度)、速度、加速度、姿態等參數,結合飛機動力學模型,通過一定的解算,算出偏差值,進行偏差反饋控制。如經典PID控制等 。
