
靜不穩定產生機理
高超聲速飛行器飛行過程出現靜不穩定現象的原因主要有以下兩個方面:
(1)高超聲速飛行器推力/機體一體化的獨特氣動外形。高超聲速飛行器推力/機體一體化的通用氣動外形如圖1所示。其前體既是飛行器機體的一部分,同時前體產生的激波又是超燃衝壓發動機的預壓縮氣體,為超燃衝壓發動機的進氣道所捕獲。同樣,後體既是飛行器機體的一部分,又是發動機出口的擴張段。
 圖1
圖1由於飛行器前體較長,且質量分布較小,因而使得飛行器的質心很難配置在飛行器壓心之前。同時,前體在飛行過程中產生較大的附加升力,使得飛行器的壓心進一步前移。位於飛行器腹下的發動機進氣道還會產生附加的氣動力矩。因此,正常情況下,乘波體外形的高超聲速飛行器在氣動特性上將是靜不穩定的。
儘管X一43A高超聲速飛行器通過頭部配重可以使飛行器處於靜穩定狀態,但這種情況也僅適用於短時間的飛行試驗。在長航時飛行時,通過頭部配重將是不可取的,因為通過配重調整飛行器的質心,將會使飛行器的整體變重,降低飛行器的有效載荷,增大飛行器的平衡攻角;在同等燃料的情況下,會減小飛行器的航程。
(2)高超聲速飛行器人為設計為中立穩定或靜不穩定。這種情況主要利用中立穩定或靜不穩定時可以減小飛行器巡航飛行時的配平舵偏,降低飛行器的阻力,在同等燃料的情況下,會增大飛行器的射程。
綜上所述,未來高超聲速飛行器在長航時飛行時,將會出現靜不穩定問題,因此,高超聲速飛行器飛行控制技術必然面臨靜不穩定控制的挑戰。
靜不穩定度對舵機的影響
靜不穩定成為高超聲速飛行器發展的必然趨勢,而舵系統固有頻率隨著飛行器靜不穩定度的增加而非線性增長。圖2為舵系統固有頻率與飛行器靜穩定度之間的關係圖。
由圖2可以看出靜不穩定飛行器要求舵系統有更高的工作頻率,同樣快速的情況下,靜穩定飛行器與靜不穩定飛行器相比允許用固有頻率1/2到1/3的舵系統。相反,使用同樣固有頻率的舵系統.靜不穩定飛行器對指令的反應時間是靜穩定飛行器的2倍。
同時高超飛行器作為遠程打擊武器,重量大,飛行速度快,需要抑制助推分離帶來的大擾動,因此負載力矩要求較大。
另外,由於高超聲速飛行器高精度姿態控制要求,需要儘可能地提高舵機控制精度,減少摩擦、間隙等非線性。
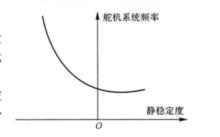 圖2
圖2因此,未來高超聲速飛行器用舵機需要在現代舵機基礎上具備高頻帶、高控制精度、大力矩、小非線性的特點。
