
 軍用機器人車輛
軍用機器人車輛基本信息
軍用機器人車輛經歷了一個從遙控車輛到自主車輛的發展過程。隨著用途的日益擴展,
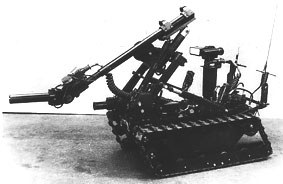
 美國ROBAT遙控掃雷車
美國ROBAT遙控掃雷車1.遙控車輛
首先發展的軍用機器人車輛是遙控無人車輛,遙控操作手遠離車輛,通過選定的控制方式進行遙控。早期的遙控車輛功能簡單,如首輛投入使用的德國歌利亞(Goliath)爆炸物運送車僅是一種把爆炸物送到目的地而整車引爆的一次性使用遙控車輛,用電纜通信控制,主要用於摧毀防禦工事或掃雷。該車在1942~1945年共生產了7000多輛,用於法國和蘇聯等國戰場。後來德國又研製了一種更先進的BIV型機器人車輛,能在目的地把裝藥投射出去,採用無線電控制,克服了電纜控制距離短的缺點。為解決無人車輛在操作手視線以外的控制問題,近年來在車輛上配備了立體電視攝像機,操作手可在遙控台監視器上進行觀察控制,宛如身臨其境的感覺。目前廣為使用的是光纖控制,光纖是纜重量輕(每1000m約2kg),信號衰減少,且能傳輸更多的信息,保密性好。採用光纖控制的機器人車輛遙控距離遠,如美國的突擊隊員機器人車(Robotic Ranger Vehicle),遙控距離可達10km。
為使光纖控制和無線電控制相互取長補短,一些遙控車輛的控制採用了兩者相結合的方法。如美國陸軍的ROBAT掃雷車,以無線電控制為主,光纖控制為輔,而美國海軍陸戰隊的遙控車輛則以光纖控制為主,無線電控制為輔。
遙控機器人車輛是較低級的機器人系統,必須由人進行遠距離控制,在目前的技術水平條件下,這種車輛的研製易獲成功,周期短,費用低。
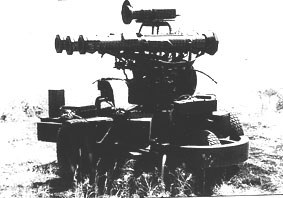
 美國PROWLER機器人車
美國PROWLER機器人車2.自主式機器人車輛
自主式車輛與遙控車輛區別是它不需要操作手,而是依靠自身的人工智慧型來完成預定的動作和任務,主要特徵是採用了許多先進而可靠的感測器和高速計算機系統,需要複雜的人工智慧/專家系統程式。在地面行駛時能選擇最佳路線和地形到達目的地。自主式車輛的地面導向需要快速計算機處理系統,而其觀察系統需要有高水平的圖像識別能力。
雖然自主式車輛是機器人車輛的發展方向,但目前各種自主式車輛研製都未達到實用階段,大都是半自主式,而且完成的車型也不多,自主式工作能力有限,如美國陸軍的PROWLER 60系列車僅具有沿邊界自主巡邏的能力。
研製情況
目前,美國、以色列、英國、西班牙、法國、聯邦德國、日本和蘇聯等都
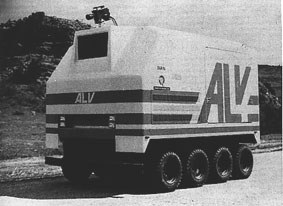 美國自主式地面車輛
美國自主式地面車輛美國是研製軍用機器人車輛最積極和進展最快的國家,已擁有多種生產型車和試製樣車。該車研製工作開始於80年代初,國防部預研規劃局、陸軍坦克機動車輛局和海軍陸戰隊等都很重視,不僅所屬研究機構開展了研製工作,而且還與許多大學及廠商進行廣泛協作。1983年專門成立的機器人防務系統公司就專門從事軍用機器人車輛的研製工作。目前美國比較成功的軍用機器人車輛主要有ROBAT掃雷車、PROWLER機器人車和突擊隊員機器人車等。
為提高軍用機器人車輛的水平,美國國防部預研規劃局業已開始了自主式地面車輛計畫的研究工作。該計畫實際上是研製一輛機器人技術表演平台,以論證自主技術研究的最新成果。主要技術有視沉系統、新的計算機結構、規劃系統、語言及微電子設備等。
以色列的二十一世紀九月有限公司(Israel's 21st Century Sivan Ltd)目前已研製出了TSR700型和TSR50 型兩種遙控式警戒車,前者已裝備使用。正在研製TSR150型半自主式機器人車輛。
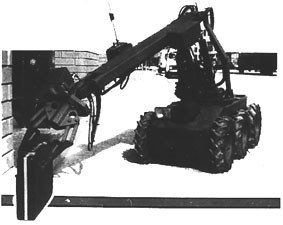
英國的機器人車輛研究工作開始於1972年,成功的車型是稱為手推車(Wheelbarrow)的遙控車輛,主要用於清理爆炸物,其最新型號為MK8型。該車目前已生產500輛以上,裝備40多個國家。一種稱為紅火(Redfire)的變型車曾在1982年的馬爾維納斯群島戰爭中用於掃雷。
 英國手推車MK8遙控車
英國手推車MK8遙控車法國AID公司研製一種RM200型(6×6)輪式機器人車輛,用電纜控制,車重250kg,用蓄電池供電驅動,用於清理炸彈等。
聯邦德國目前有14多家公司和一些大學研究機構從事機器人研究。陸軍也積極資助,並考慮若干套用範圍。道尼爾·艾爾特羅(Dornier/Eltro)公司已經設計出一種遙控探雷車SMG。
日本是世界上工業機器人生產和套用的領先國家,現在積極進行無人車輛的研究。雖然這些無人車輛是為民用目的設計的,但也能用於軍事,尤其是用於後勤支援。日立工程研究實驗室已製造了一種能隨著地形的變化而改變其外形的可變形態履帶車的樣車模型。
套用範圍
軍用機器人車輛的套用範圍很廣,而且還在不斷地擴大。目前軍用機器人車輛的主要套用有下列幾個方面。
 西班牙羅德輪式機器人車
西班牙羅德輪式機器人車1.掃雷
掃雷機器人車的使用較早,如歌利亞就可用於引爆地雷。目前最成功的車型是美國在1985年製造的ROBAT掃雷車。
2.排除爆炸物
世界上最有名的排除爆炸物機器人是英國的手推車機器人車。以色列的TSR700黃峰遙控車輛也能用於排除爆炸物或處理各種危險品等。
3.哨兵站崗巡邏
比較成功的車型是美國的PROWLER機器人車,可自主式工作,也可遙控工作,其60系列車已具備了自主式邊界巡邏能力,可為核電站、化工廠、飛彈發射井等重要地區擔任巡邏警戒任務。
4.作戰平台
這類機器人車實際上是一種機動性武器平台,上面可以安裝各種武器組件,執行戰鬥任務。如美國格魯曼航天公司(Grumman Aerospace Corporation)研製的突擊隊員機器人車可安裝3枚反坦克飛彈,位於前沿陣地實施反坦克作戰。PROWLER車的70系列也可用於反坦克作戰。
5.偵察
如三防偵察、遠距離陣地偵察等。PROWLER 50系列車可實施遠距離偵察,攝像機位於豎起的桅桿頂部,可超越山丘、樹林等進行偵察。
6.戰場後勤支援
如美國研製中的小型掩體挖掘機(SEE),通過遙控能使士兵和操作手脫離危險環境,減少傷亡。隨著機器人技術發展,這類車輛將逐漸增加其自主能力。
技術特點
作為一個完整的軍用機器人車輛系統,它的功能組件或子系統很多,涉及的技術領域相
 以色列TSR-700黃蜂警戒車
以色列TSR-700黃蜂警戒車1.推進系統
包括動力裝置、行動機構和地面導航系統等。目前各國都很重視研究重量輕、扭矩大而且操作靈活的電動推進系統。行動機構大多是輪式或履帶式,也有步行式機器人系統,新研製的車型以輪式居多。
2.感測器
它相當於人的五官,負責採集所需要的環境信息,關鍵技術是視沉成像感測器,如高解析度立體電視攝像機,熱像儀和毫米波雷達等。車載感測器還有距離感測器、聲學接近感感測器、溫度感測器、慣性基準感測器、三防偵察感測器和報警器等。
3.信息處理/控制系統
該系統以高速計算機為中心,主要用於提取關鍵信息,對所得圖像進行識別和判斷,建立機器人任務模型,用指令信號對被控變數進行控制,使車輛完成一定的動作和特定任務。
4.通信系統
主要完成機器人車輛狀態和動作與控制台之間的信息傳遞,使操作手監控機器人車輛,實施遙控。
5.執行/輸出機構
用於精確地完成某種類型的動作及特定任務,如操作臂,各種武器系統,各種特定任務組件等。如PROWLER機器人車的桅桿式偵察系統實施遠距離偵察,作戰平台上安裝飛彈系統進行反坦克作戰,完成瞄準射擊等動作。
6.其他
如防護系統和特種武器系統。根據車輛任務需要,目前可供選擇的武器系統有7.62mm機槍等輕武器,有反坦克飛彈等重型武器。
發展趨勢
1.軍事地位增強
 軍用機器人車輛
軍用機器人車輛軍用機器人車輛在未來戰場上的地位將日益受到重視,其作用會更大。隨著各種機器人技術的日益成熟,將會有更多更先進的機器人車輛安裝各種武器系統用於軍事目的,從而減少人員傷亡。未來的戰場兵力部署結構或形式也會因此有所改變,如成立機器人兵團等。
2.套用範圍擴大
軍用機器人車輛的套用範圍會增加,如用於新式武器系統試驗、清除污染、軍工生產、電子對抗等。
3.基礎研究加強
為發展高性能機器人車輛,各國將日益重視軍用機器人技術的基礎研究,如高速計算機計算結構、並行計算技術套用、圖像識別和處理技術、人工智慧和專家系統等。隨著這些技術的成熟,不久將會出現無人駕駛的全自主式車輛。
