魯棒控制
魯棒控制(Robust Control)方面的研究始於20世紀50年代。在過去的20年中,魯棒控制一直是國際自控界的研究熱點。所謂“魯棒性”,是指控制系統在一定(結構,大小)的參數攝動下,維持某些性能的特性。根據對性能的不同定義,可分為穩定魯棒性和性能魯棒性。以閉環系統的魯棒性作為目標設計得到的固定控制器稱為魯棒控制器。
由於工作狀況變動、外部干擾以及建模誤差的緣故,實際工業過程的精確模型很難得到,而系統的各種故障也將導致模型的不確定性,因此可以說模型的不確定性在控制系統中廣泛存在。如何設計一個固定的控制器,使具有不確定性的對象滿足控制品質,也就是魯棒控制,成為國內外科研人員的研究課題。
主要的魯棒控制理論有:(1)Kharitonov區間理論;(2)H∞控制理論;(3)結構奇異值理論(μ理論)等等。
H∞控制理論
H∞控制理論是20世紀80年代開始興起的一門新的現代控制理論。H∞控制理論是為了改變近代控制理論過於數學化的傾向以適應工程實際的需要而誕生的,其設計思想的真髓是對系統的頻域特性進行整形(Loopshaping),而這種通過調整系統頻率域特性來獲得預期特性的方法,正是工程技術人員所熟悉的技術手段,也是經典控制理論的根本。
1981年Zames首次用明確的數學語言描述了H∞最佳化控制理論,他提出用傳遞函式陣的H∞範數來記述最佳化指標。1984年加拿大學者Fracis和Zames用古典的函式插值理論提出了H∞設計問題的最初解法,同時基於運算元理論等現代數學工具,這種解法很快被推廣到一般的多變數系統,而英國學者Glover則將H∞設計問題歸納為函式逼近問題,並用Hankel運算元理論給出這個問題的解析解。Glover的解法被Doyle在狀態空間上進行了整理並歸納為H∞控制問題,至此H∞控制理論體系已初步形成。
在這一階段提出了H∞設計問題的解法,所用的數學工具非常繁瑣,並不像問題本身那樣具有明確的工程意義。直到1988年Doyle等人在全美控制年會上發表了著名的DGKF論文,證明了H∞設計問題的解可以通過適當的代數Riccati方程得到。DGKF的論文標誌著H∞控制理論的成熟。迄今為止,H∞設計方法主要是DGKF等人的解法。不僅如此,這些設計理論的開發者還同美國的The Math Works公司合作,開發了MATLAB中魯棒控制軟體工具箱(Robust Control Toolbox),使H∞控制理論真正成為實用的工程設計理論。
變結構控制
所謂變結構,是指當系統的狀態滿足一定的條件時,系統的控制結構將發生變化。變結構控制(VSC)就是當系統狀態穿越不同區域時,反饋控制的結構按照一定的規律發生變化,使得控制系統對被控對象的內在參數變化和外部環境擾動等因素具有一定的適應能力,保證系統性能達到期望的性能指標要求。
由於變結構控制具有抗擾性、自適應性、魯棒性、實現容易等優點,因此變結構控制引起了人們的普遍重視。
發展
變結構控制的研究始於 20 世紀 50 年代,前蘇聯學者 Emelyanov 等提出了變結構控制概念。隨後 Utkin,Itkis 等學者總結並發展了滑模變結構控制理論,奠定了滑模變結構控制的理論基礎。20 世紀 80 年代以來,隨著確定切換函式的系統性方法的出現和微分幾何理論的發展,變結構控制開始了新的發展階段。近二十年來,隨著計算機技術和大功率電子開關器件的發展,變結構控制的實現變得越來越容易,因此該方法受到了國內外控制界的廣泛重視,現已成為自動控制領域的重要設計方法,並在工程套用中得到了推廣套用。
變結構控制是指系統狀態達到切換函式值,系統從一個結構自動地切換到另一個確定的結構(結構是一組數學方程描述的模型)。從本質上講它具有開關切換特性,是一種控制系統的設計方法,適用於線性及非線性系統,包括控制系統的調節,跟蹤,自適應及不確定等系統。它具有一些優良特性,尤其是對加給系統的攝動和干擾有良好的自適應性。
分類
圖 1對變結構控制作了大致的分類,變結構控制可分為兩大類:
 圖1 變結構控制器分類圖
圖1 變結構控制器分類圖一類是不具有滑動模態的變結構控制,如Bang-Bang 控制、輸出反饋變結構控制、多輸入繼電控制等。這一類控制只能稱為變結構控制,雖然控制器可根據反饋量改變系統的結構使系統穩定於平衡位置,但系統不存在一個可滑動的面。
另一類是具有滑動模態(簡稱為滑模或滑模面)的變結構控制。這一類控制可稱為滑模變結構控制或滑模控制,它的控制分為兩個步驟:首先是系統從初始狀態趨近於併到達滑模面,接著系統在滑模面上滑動併到達平衡位置。
變結構控制器都有一個切換面,如 x1,x2或者 x1+5x2,而具有滑動模態的切換面才稱為滑模面。
變結構魯棒控制
變結構魯棒控制(Variable structure robust control)是指控制系統在一定(結構,大小)的參數攝動下,維持某些性能的特性,當系統的狀態滿足一定的條件時,系統的控制結構將發生變化。變結構魯棒控制就是當系統狀態穿越不同區域時,反饋控制的結構按照一定的規律發生變化,使得控制系統對被控對象的內在參數變化和外部環境擾動等因素具有一定的適應能力,保證系統性能達到期望的性能指標要求的控制方式。
研究
變結構魯棒控制的早期研究,主要針對單變數系統(SISO)的在微小攝動下的不確定性,具有代表性的是Zames提出的微分靈敏度分析。然而,實際工業過程中故障導致系統中參數的變化,這種變化是有界攝動而不是無窮小攝動。因此產生了以討論參數在有界攝動下系統性能保持和控制為內容的現代魯棒控制。
現代變結構魯棒控制是一個著重控制算法可靠性研究的控制器設計方法。其設計目標是找到在實際環境中為保證安全要求控制系統最小必須滿足的要求。一旦設計好這個控制器,它的參數不能改變而且控制性能能夠保證。
變結構魯棒控制方法,是對時間域或頻率域來說,一般要假設過程動態特性的信息和它的變化範圍。一些算法不需要精確的過程模型,但需要一些離線辨識。
一般變結構魯棒控制系統的設計是以一些最差的情況為基礎,因此一般系統並不工作在最優狀態。常用的設計方法有:INA方法,同時鎮定,完整性控制器設計,魯棒控制,魯棒PID控制以及魯棒極點配置,魯棒觀測器等。
變結構魯棒控制方法適用於穩定性和可靠性作為首要目標的套用,同時過程的動態特性已知且不確定因素的變化範圍可以預估。飛機和空間飛行器的控制是這類系統的例子。
過程控制套用中,某些控制系統也可以用魯棒控制方法設計,特別是對那些比較關鍵且(1)不確定因素變化範圍大;(2)穩定裕度小的對象。
但是,魯棒控制系統的設計要由高級專家完成。一旦設計成功,就不需太多的人工干預。另一方面,如果要升級或作重大調整,系統就要重新設計。
H∞魯棒控制理論的特點
1) 將經典頻域設計理論具有一定的魯棒性和現代控制理論狀態空間方法適於MIMO 系統的兩個優點融合在一起,系統地給出了在頻域中進行迴路成形的技術和手段。
2) 給出了魯棒控制系統的設計方法,並充分考慮了系統不確定性的影響,不僅能保證控制系統的魯棒穩定性,而且能最佳化某些性能指標。
3) 採用狀態空間方法,具有時域方法精確計算和最最佳化的優點。
4) 多種控制問題均可變換為H∞魯棒控制理論的標準問題,具有一般性,並適於實際工程套用。
變結構魯棒控制設計
變結構魯棒控制的特點就在於控制量的非線性切換。這樣的切換控制需要兩方面的設計 :
一 是選擇切換面,如全狀態滑模變結構的切換面一般是,部分狀態滑模變結構的切換面只是一部分狀態反饋的線性組合,而非滑模變結構的切換面一般是某一個狀態反饋;
二是切換控制律,它一般表示為其中 K(x)為切換項增益,f (s(x))為切換控制器,常用的切換控制器有理想繼電器、滯環繼電器等是最常用的切換控制律。
全狀態滑模面設計
滑模面的設計是滑模變結構控制的核心問題。滑模面設計的好壞決定系統的性能,它同時還關係到系統的穩定性和抖振的大小。滑模面的設計方法較多,具有代表性的方法有基於降階的滑模面設計、基於線性矩陣不等式(LMI)的滑模面設計、時變滑模面設計等。
非滑模變結構切換面設計
非滑模變結構切換面的設計具有更強的靈活性,同時也需要利用多種手段來分析它們。學者 Boiko、Huang、Oliveira、Plestan 提出了多種切換面設計方法,也考慮了切換面與系統的穩定關係。
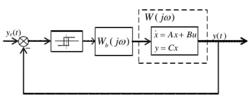 圖2 滯環繼電器補償控制
圖2 滯環繼電器補償控制圖 2、圖3列出了 Boiko 提出的兩種控制方法。Boiko 採用描述函式(DF)法和 LPRS 法分析它們的穩定性。圖 2控制器將系統輸出作為切換面,Boiko 利用 DF 法分析滯環繼電器和 W(jω)的幅相頻率特性。若無法得到期望的性能,則設計補償環節,調節 W(jω)的幅相頻率特性的分布。圖 3將系統輸出 y(t)及其導數y'(t)作為控制器的兩個切換面,通過改變兩繼電器增益,可使其描述函式在第二象限旋轉,從而改善系統控制精度。
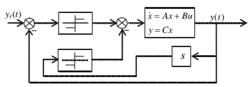 圖3 多輸入繼電器控制
圖3 多輸入繼電器控制切換控制器設計
切換控制器關係到系統魯棒性和抖振特性。常用的切換控制器類型有理想繼電器、飽和函式、滯環繼電器、2-SMC等。
(1) 理想繼電器是最常用的切換控制器,系統狀態一旦穿越切換面,理想繼電器就輸出反向控制量,因此具有很好的魯棒性,但它容易受到噪聲的影響,且易引入較快的抖振頻率。
(2) 飽和函式抑制抖振的效果明顯,但它可能使滑模控制失去魯棒性。
(3)滯環繼電器使切換控制器變得相對遲鈍,增大了切換面寬度,降低了控制精度,但通過改變遲滯量可調節抖振幅度和頻率。
(4)2-SMC 具有多個控制參數,通過改變這些參數可更加靈活地調節控制器的魯棒性和抖振特性,抖振頻率既能降低也能提高。
