
系統簡介
基本概念
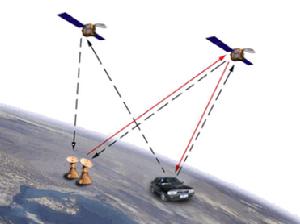 衛星定位工作原理
衛星定位工作原理歷史發展
全球定位系統(GPS)是20世紀70年代由美國陸海空三軍聯合研製的新一代空間衛星導航定位系統。其主要目的是為陸、海、空三大領域提供實時、全天候和全球性的導航服務,並用於情報收集、核爆監測和應急通訊等一些軍事目的,是美國獨霸全球戰略的重要組成。經過20餘年的研究實驗,耗資300億美元,到1994年3月,全球覆蓋率高達98%的24顆GPS衛星星座己布設完成。系統組成
GPS全球衛星定位系統由三部分組成:空間部分———GPS星座;地面控制部分———地面監控系統;用戶設備部分———GPS信號接收機。GPS定位技術具有高精度、高效率和低成本的優點,使其在各類大地測量控制網的加強改造和建立以及在公路工程測量和大型構造物的變形測量中得到了較為廣泛的套用。
傳播系統
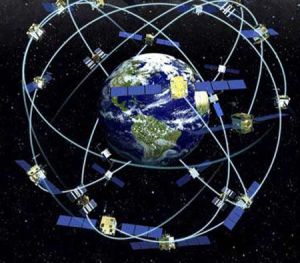
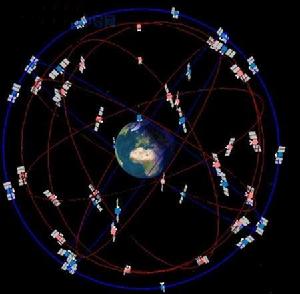
由24顆衛星組成。其中,工作衛星21顆,備用衛星3顆,平均分布在6個軌道上,每個軌道4顆衛星,在半徑26560千米的近圓形軌道上運行,運行周期11小時58分鐘。空間衛星系統保證地面上任何地點,任何時間都可以觀測到4顆以上的衛星,並接受到衛星攜帶的無線電發射機連續播放的GPS導航信號。導航儀
簡單地說,GPS導航儀就是能夠幫助用戶準確定位當前位置,並且根據既定的目的地計算行程,通過地圖顯示和語音提示兩種方式引導用戶行至目的地的汽車駕駛輔助設備。它包括兩個重要的組成部分:一是全球定位系統(GlobalPositioningSystem)簡稱GPS。它是由空間衛星、地面監控和用戶接收等三大部分組成。在太空中有24顆衛星組成一個分布網路,分別分布在6條離地面2萬公里、傾斜角為55°的地球準同步軌道上,每條軌道上有4顆衛星。GPS衛星每隔12小時繞地球一周,使地球上任一地點能夠同時接收7~9顆衛星的信號。地面共有1個主控站和5個監控站負責對衛星的監視、遙測、跟蹤和控制。它們負責對每顆衛星進行觀測,並向主控站提供觀測數據。主控站收到數據後,計算出每顆衛星在每一時刻的精確位置,並通過3個注入站將它傳送到衛星上去,衛星再將這些數據通過無線電波向地面發射至用戶接收端設備。
註:這個系統最初是由美國陸海空三軍於20世紀70年代聯合研製的,它的主要目的是為陸、海、空三大領域提供實時、全天候和全球性的導航服務,用於情報收集、核爆監測和應急通訊等一些軍事目的,是美國獨霸全球戰略的重要部署。GPS系統歷經20餘年的研究實驗,耗資300億美元,直到1994年3月全球覆蓋率高達98%的24顆GPS衛星星座才正式布設完成。GPS系統的套用不僅局限在軍事領域內了,而是發展到汽車導航、大氣觀測、地理勘測、海洋救援、載人太空飛行器防護探測等各個領域。
二是汽車導航系統。光有GPS系統還不夠,它只能夠接收GPS衛星傳送的數據,計算出用戶的三維位置、方向以及運動速度和時間方面的信息,沒有路徑計算能力。用戶手中的GPS接收設備要想實現路線導航功能還需要一套完善的包含硬體設備、電子地圖、導航軟體在內的汽車導航系統。
GPS導航儀硬體包括晶片、天線、處理器、記憶體、螢幕、按鍵、揚聲器等組成部分。市場中的GPS汽車導航儀在硬體上的差距並不大,主要區別還是集中在內置的軟體和地圖上。在這裡需要提醒大家注意一點,人們習慣上總是關心導航儀內預裝何種地圖,實際上這是混淆了地圖和軟體兩者的區別。所謂地圖其實只是數據,而軟體是搜尋引擎。地圖中各種地理信息綜合在一起的龐大數據如何被用戶所套用?如何才能反應到導航界面中?這就要藉助於軟體來實現了。因此導航地圖離不開軟體的支持,反過來再優秀的軟體系統如果沒有詳細的地圖數據也是白搭。
總結一下,一部完整的GPS汽車導航儀是由晶片、天線、處理器、記憶體、顯示屏、揚聲器、按鍵、擴展功能插槽、電子地圖、導航軟體10個主要部分組成。
判斷GPS導航儀的優劣,導航儀所能接收到的GPS衛星數量和路徑規劃能力是關鍵。導航儀所能接收到的有效衛星數量越多,說明它當前的信號越強,導航工作的狀態也就越穩定。如果一台導航儀經常搜尋不到衛星或者在導航過程中頻繁地中斷信號影響了正常的導航工作,那它首先質量就不過關更談不上優劣了。
前身
GPS系統的前身為美軍研製的一種子午儀衛星定位系統(Transit),1958年研製,64年正式投入使用。該系統用5到6顆衛星組成的星網工作,每天最多繞過地球13次,並且無法給出高度信息,在定位精度方面也不盡如人意。然而,子午儀系統使得研發部門對衛星定位取得了初步的經驗,並驗證了由衛星系統進行定位的可行性,為GPS系統的研製埋下了鋪墊。由於衛星定位顯示出在導航方面的巨大優越性及子午儀系統存在對潛艇和艦船導航方面的巨大缺陷。美國海陸空三軍及民用部門都感到迫切需要一種新的衛星導航系統。為此,美國海軍研究實驗室(NRL)提出了名為Tinmation的用12到18顆衛星組成10000km高度的全球定位網計畫,並於67年、69年和74年各發射了一顆試驗衛星,在這些衛星上初步試驗了原子鐘計時系統,這是GPS系統精確定位的基礎。而美國空軍則提出了621-B的以每星群4到5顆衛星組成3至4個星群的計畫,這些衛星中除1顆採用同步軌道外其餘的都使用周期為24h的傾斜軌道該計畫以偽隨機碼(PRN)為基礎傳播衛星測距信號,其強大的功能,當信號密度低於環境噪聲的1%時也能將其檢測出來。偽隨機碼的成功運用是GPS系統得以取得成功的一個重要基礎。海軍的計畫主要用於為艦船提供低動態的2維定位,空軍的計畫能供提供高動態服務,然而系統過於複雜。由於同時研製兩個系統會造成巨大的費用而且這裡兩個計畫都是為了提供全球定位而設計的,所以1973年美國國防部將2者合二為一,並由國防部牽頭的衛星導航定位聯合計畫局(JPO)領導,還將辦事機構設立在洛杉磯的空軍航天處。該機構成員眾多,包括美國陸軍、海軍、海軍陸戰隊、交通部、國防製圖局、北約和澳大利亞的代表。
常用術語
(這裡解釋全球定位系統已經太多了,我就不囉嗦了,把它設成超級連結,想看就點擊吧)1.坐標(Cordinate)
有二維和三維兩種表示。
2.路標(Landmarkorwaypoint)
GPS記憶體的一個坐標值。
3.路線(Route)
路線是GPS記憶體中存儲的一組數據,包括一個起點和一個終點的坐標,還可以包括若干中間點的坐標,每兩個坐標之間的線段叫一條腿。
4.前進方向(Heading)
GPS沒有指北針的功能,靜止不動時是不知道方向的。
5.導向(Bearing)
6.日出日落時間(Sunset/raisetime)
7.足跡線(Plottrail)
構成
空間部分
GPS的空間部分是由24顆工作衛星組成,它位於距地表20200km的上空,均勻分布在6個軌道面上(每個軌道面4顆),軌道傾角為55°。此外,還有4顆有源備份衛星在軌運行。衛星的分布使得在全球任何地方、任何時間都可觀測到4顆以上的衛星,並能保持良好定位解算精度的幾何圖象。這就提供了在時間上連續的全球導航能力。GPS衛星產生兩組電碼,一組稱為C/A碼(Coarse/AcquisitionCode11023MHz);一組稱為P碼(ProciseCode10123MHz),P碼因頻率較高,不易受干擾,定位精度高,因此受美國軍方管制,並設有密碼,一般民間無法解讀,主要為美國軍方服務。C/A碼人為採取措施而刻意降低精度後,主要開放給民間使用。地面部分
地面控制部分由一個主控站,5個全球監測站和3個地面控制站組成。監測站均配裝有精密的銫鐘和能夠連續測量到所有可見衛星的接受機。監測站將取得的衛星觀測數據,包括電離層和氣象數據,經過初步處理後,傳送到主控站。主控站從各監測站收集跟蹤數據,計算出衛星的軌道和時鐘參數,然後將結果送到3個地面控制站。地面控制站在每顆衛星運行至上空時,把這些導航數據及主控站指令注入到衛星。這種注入對每顆GPS衛星每天一次,並在衛星離開注入站作用範圍之前進行最後的注入。如果某地面站發生故障,那么在衛星中預存的導航信息還可用一段時間,但導航精度會逐漸降低。設備部分
用戶設備部分即GPS信號接收機。其主要功能是能夠捕獲到按一定衛星截止角所選擇的待測衛星,並跟蹤這些衛星的運行。當接收機捕獲到跟蹤的衛星信號後,即可測量出接收天線至衛星的偽距離和距離的變化率,解調出衛星軌道參數等數據。根據這些數據,接收機中的微處理計算機就可按定位解算方法進行定位計算,計算出用戶所在地理位置的經緯度、高度、速度、時間等信息。接收機硬體和機內軟體以及GPS數據的後處理軟體包構成完整的GPS用戶設備。GPS接收機的結構分為天線單元和接收單元兩部分。接收機一般採用機內和機外兩種直流電源。設定機內電源的目的在於更換外電源時不中斷連續觀測。在用機外電源時機內電池自動充電。關機後,機內電池為RAM存儲器供電,以防止數據丟失。各種類型的接受機體積越來越小,重量越來越輕,便於野外觀測使用。原理
GPS導航系統的基本原理是測量出已知位置的衛星到用戶接收機之間的距離,然后綜合多顆衛星的數據就可知道接收機的具體位置。要達到這一目的,衛星的位置可以根據星載時鐘所記錄的時間在衛星星曆中查出。而用戶到衛星的距離則通過紀錄衛星信號傳播到用戶所經歷的時間,再將其乘以光速得到(由於大氣層電離層的干擾,這一距離並不是用戶與衛星之間的真實距離,而是偽距(PR):當GPS衛星正常工作時,會不斷地用1和0二進制碼元組成的偽隨機碼(簡稱偽碼)發射導航電文。GPS系統使用的偽碼一共有兩種,分別是民用的C/A碼和軍用的P(Y)碼。C/A碼頻率1.023MHz,重複周期一毫秒,碼間距1微秒,相當於300m;P碼頻率10.23MHz,重複周期266.4天,碼間距0.1微秒,相當於30m。而Y碼是在P碼的基礎上形成的,保密性能更佳。導航電文包括衛星星曆、工作狀況、時鐘改正、電離層時延修正、大氣折射修正等信息。它是從衛星信號中解調製出來,以50b/s調製在載頻上發射的。導航電文每個主幀中包含5個子幀每幀長6s。前三幀各10個字碼;每三十秒重複一次,每小時更新一次。後兩幀共15000b。導航電文中的內容主要有遙測碼、轉換碼、第1、2、3數據塊,其中最重要的則為星曆數據。當用戶接受到導航電文時,提取出衛星時間並將其與自己的時鐘做對比便可得知衛星與用戶的距離,再利用導航電文中的衛星星曆數據推算出衛星發射電文時所處位置,用戶在WGS-84大地坐標系中的位置速度等信息便可得知。可見GPS導航系統衛星部分的作用就是不斷地發射導航電文。然而,由於用戶接受機使用的時鐘與衛星星載時鐘不可能總是同步,所以除了用戶的三維坐標x、y、z外,還要引進一個Δt即衛星與接收機之間的時間差作為未知數,然後用4個方程將這4個未知數解出來。所以如果想知道接收機所處的位置,至少要能接收到4個衛星的信號。
GPS接收機可接收到可用於授時的準確至納秒級的時間信息;用於預報未來幾個月內衛星所處概略位置的預報星曆;用於計算定位時所需衛星坐標的廣播星曆,精度為幾米至幾十米(各個衛星不同,隨時變化);以及GPS系統信息,如衛星狀況等。
GPS接收機對碼的量測就可得到衛星到接收機的距離,由於含有接收機衛星鐘的誤差及大氣傳播誤差,故稱為偽距。對0A碼測得的偽距稱為UA碼偽距,精度約為20米左右,對P碼測得的偽距稱為P碼偽距,精度約為2米左右。
GPS接收機對收到的衛星信號,進行解碼或採用其它技術,將調製在載波上的信息去掉後,就可以恢復載波。嚴格而言,載波相位應被稱為載波拍頻相位,它是收到的受都卜勒頻移影響的衛星信號載波相位與接收機本機振蕩產生信號相位之差。一般在接收機鍾確定的曆元時刻量測,保持對衛星信號的跟蹤,就可記錄下相位的變化值,但開始觀測時的接收機和衛星振盪器的相位初值是不知道的,起始曆元的相位整數也是不知道的,即整周模糊度,只能在數據處理中作為參數解算。相位觀測值的精度高至毫米,但前提是解出整周模糊度,因此只有在相對定位、並有一段連續觀測值時才能使用相位觀測值,而要達到優於米級的定位精度也只能採用相位觀測值。
按定位方式,GPS定位分為單點定位和相對定位(差分定位)。單點定位就是根據一台接收機的觀測數據來確定接收機位置的方式,它只能採用偽距觀測量,可用於車船等的概略導航定位。相對定位(差分定位)是根據兩台以上接收機的觀測數據來確定觀測點之間的相對位置的方法,它既可採用偽距觀測量也可採用相位觀測量,大地測量或工程測量均應採用相位觀測值進行相對定位。
在GPS觀測量中包含了衛星和接收機的鐘差、大氣傳播延遲、多路徑效應等誤差,在定位計算時還要受到衛星廣播星曆誤差的影響,在進行相對定位時大部分公共誤差被抵消或削弱,因此定位精度將大大提高,雙頻接收機可以根據兩個頻率的觀測量抵消大氣中電離層誤差的主要部分,在精度要求高,接收機間距離較遠時(大氣有明顯差別),應選用雙頻接收機。
相對論為GPS提供了所需的修正
全球定位系統GPS衛星的定時信號提供緯度、經度和高度的信息,精確的距離測量需要精確的時鐘。因此精確的GPS接受器就要用到相對論效應。
準確度在30米之內的GPS接受器就意味著它已經利用了相對論效應。華盛頓大學的物理學家CliffordM.Will詳細解釋說:“如果不考慮相對論效應,衛星上的時鐘就和地球的時鐘不同步。”相對論認為快速移動物體隨時間的流逝比靜止的要慢。Will計算出,每個GPS衛星每小時跨過大約1.4萬千米的路程,這意味著它的星載原子鐘每天要比地球上的鐘慢7微秒。
而引力對時間施加了更大的相對論效應。大約2萬千米的高空,GPS衛星經受到的引力拉力大約相當於地面上的四分之一。結果就是星載時鐘每天快45微秒,GPS要計入共38微秒的偏差。Ashby解釋說:“如果衛星上沒有頻率補償,每天將會增大11千米的誤差。”(這種效應實事上更為複雜,因為衛星沿著一個偏心軌道,有時離地球較近,有時又離得較遠。)
前景
由於GPS技術所具有的全天候、高精度和自動測量的特點,作為先進的測量手段和新的生產力,已經融入了國民經濟建設、國防建設和社會發展的各個套用領域。隨著冷戰結束和全球經濟的蓬勃發展,美國政府宣布2000年至2006年期間,在保證美國國家安全不受威脅的前提下,取消SA政策,GPS民用信號精度在全球範圍內得到改善,利用C/A碼進行單點定位的精度由100米提高到20米,這將進一步推動GPS技術的套用,提高生產力、作業效率、科學水平以及人們的生活質量,刺激GPS市場的增長。據有關專家預測,在美國,單單是汽車GPS導航系統,2000年後的市場將達到30億美元,而在中國,汽車導航的市場也將達到50億元人民幣。可見,GPS技術市場的套用前景非常可觀。
特點套用
主要特點
(1)全天候;(2)全球覆蓋;(3)三維定速定時高精度;(4)快速省時高效率:(5)套用廣泛多功能;(6)操作簡便。功用
全球定位系統的主要用途:(1)陸地套用,主要包括車輛導航、應急反應、大氣物理觀測、地球物理資源勘探、工程測量、變形監測、地殼運動監測、市政規劃控制等;(2)海洋套用,包括遠洋船最佳航程航線測定、船隻實時調度與導航、海洋救援、海洋探寶、水文地質測量以及海洋平台定位、海平面升降監測等;(3)航空航天套用,包括飛機導航、航空遙感姿態控制、低軌衛星定軌、飛彈制導、航空救援和載人太空飛行器防護探測等。套用
主要是為船舶,汽車,飛機等運動物體進行定位導航。例如:1.船舶遠洋導航和進港引水
2.飛機航路引導和進場降落
3.汽車自主導航
4.地面車輛跟蹤和城市智慧型交通管理
5.緊急救生
6.個人旅遊及野外探險
7.個人通訊終端(與手機,PDA,電子地圖等集成一體)
1.電力,郵電,通訊等網路的時間同步
2.準確時間的授入
3.準確頻率的授入
1.各種等級的大地測量,控制測量
2.道路和各種線路放樣
3.水下地形測量
4.地殼形變測量,大壩和大型建築物變形監測
5.GIS套用
6.工程機械(輪胎吊,推土機等)控制
7.精細農業
◆GPS在道路工程中的套用
GPS在道路工程中的套用,主要是用於建立各種道路工程控制網及測定航測外控點等。隨著高等級公路的迅速發展,對勘測技術提出了更高的要求,由於線路長,已知點少,因此,用常規測量手段不僅布網困難,而且難以滿足高精度的要求。國內已逐步採用GPS技術建立線路首級高精度控制網,然後用常規方法布設導線加密。實踐證明,在幾十公里範圍內的點位誤差只有2厘米左右,達到了常規方法難以實現的精度,同時也大大提前了工期。GPS技術也同樣套用於特大橋樑的控制測量中。由於無需通視,可構成較強的網形,提高點位精度,同時對檢測常規測量的支點也非常有效。GPS技術在隧道測量中也具有廣泛的套用前景,GPS測量無需通視,減少了常規方法的中間環節,因此,速度快、精度高,具有明顯的經濟和社會效益。
◆GPS在汽車導航和交通管理中的套用
三維導航是GPS的首要功能,飛機、輪船、地面車輛以及步行者都可以利用GPS導航器進行導航。汽車導航系統是在全球定位系統GPS基礎上發展起來的一門新型技術。汽車導航系統由GPS導航、自律導航、微處理機、車速感測器、陀螺感測器、CD-ROM驅動器、LCD顯示器組成。GPS導航系統與電子地圖、無線電通信網路、計算機車輛管理信息系統相結合,可以實現車輛跟蹤和交通管理等許多功能。
GPS技術在導航儀中的套用舉例
國際領先GPS導航儀品牌:Ahada(艾航達)――源自美國矽谷,現已登錄中國!
Ahada(艾航達)――專注於發展先進的GPS衛星導航攜帶型設備供應商,公司產品線涉及攜帶型導航、GPS手機導航及個人手持導航裝置等全系列GPS便攜產品。
Ahada(艾航達)――在美國矽谷、中國分別成立研發、生產、銷售的機構,匯集多位在GPS、通訊領域擁有多年經驗的國際化一流科技精英,實現Ahada的領先技術和卓越品質。
國內上線首款產品:AhadaN310――高性價比機王(為商務精英和白領女性量身定做的GPS導航儀機型)
核心功能
地圖查詢
◎可以在操作終端上搜尋你要去的目的地位置。◎可以記錄你常要去的地方的位置信息,並保留下來,也和可以和別人共享這些位置信息。
◎模糊的查詢你附屬檔案或某個位置附近的如加油站,賓館、取款機等信息,
路線規劃
◎GPS導航系統會根據你設定的起始點和目的地,自動規劃一條線路。◎規劃線路可以設定是否要經過某些途徑點。
◎規劃線路可以設定是否避開高速等功能。
自動導航
◎語音導航:用語音提前向駕駛者提供路口轉向,導航系統狀況等行車信息,就像一個懂路的嚮導告訴你如何駕車去目的地一樣。導航中最重要的一個功能,使你無需觀看操作終端,通過語音提示就可以安全到達目的地。
◎畫面導航:
在操作終端上,會顯示地圖,以及車子的位置,行車速度,目的地的距離,規劃的路線提示,路口轉向提示的行車信息。
◎重新規劃線路:
當你沒有按規劃的線路行駛,或者走錯路口時候,GPS導航系統會根據你現在的位置,為你重新規劃一條新的到達目的地的線路。
詳細產品規格可登錄“艾航達”官方網站
技術知識
隨著技術水平的進步,無線通信技術和全球衛星定位系統(GPS)技術越來越多地套用於日常生活的方方面面開始。無論是汽車或尋找兒童或老年人智力殘疾喪失安全監控和維護,無線通信(GSM)和DGPS技術發揮了重要作用。基於GSM的無線通信網路覆蓋一個大範圍的數據已被破壞,很好用的便當,成本低。單獨的GPS系統,GSM系統的車輛和人員通過無線衛星定 位通信鏈路的行動電話用戶完成車輛和人員的監控傳送位置信息。種類
GPS衛星接收機種類很多,根據型號分為測地型、全站型、定時型、手持型、集成型;根據用途分為車載式、船載式、機載式、星載式、彈載式。按接收機的用途分類
1.導航型接收機
此類型接收機主要用於運動載體的導航,它可以實時給出載體的位置和速度。這類接收機一般採用C/A碼偽距測量,單點實時定位精度較低,一般為±10m,有SA影響時為±100m。這類接收機價格便宜,套用廣泛。根據套用領域的不同,此類接收機還可以進一步分為:
車載型——用於車輛導航定位;
航海型——用於船舶導航定位;
航空型——用於飛機導航定位。由於飛機運行速度快,因此,在航空上用的接收機要求能適應高速運動。
星載型——用於衛星的導航定位。由於衛星的速度高達7km/s以上,因此對接收機的要求更高。
2.測地型接收機
測地型接收機主要用於精密大地測量和精密工程測量。這類儀器主要採用載波相位觀測值進行相對定位,精度高,儀器結構複雜,價格較貴。
3.授時型接收機
這類接收機主要利用GPS衛星提供的高精度時間標準進行授時,常用於天文台及無線電通訊中時間同步。
4.2.2按接收機的載波頻率分類
單頻接收機
單頻接收機只能接收L1載波信號,測定載波相位觀測值進行定位。由於不能有效消除電離層延遲影響,單頻接收機只適用於短基線(<15km)的精密定位。
雙頻接收機
雙頻接收機可以同時接收L1,L2載波信號。利用雙頻對電離層延遲的不一樣,可以消除電離層對電磁波信號的延遲的影響,因此雙頻接收機可用於長達幾千公里的精密定位。
4.2.3按接收機通道數分類
GPS接收機能同時接收多顆GPS衛星的信號,為了分離接收到的不同衛星的信號,以實現對衛星信號的跟蹤、處理和量測,具有這樣功能的器件稱為天線信號通道。根據接收機所具有的通道種類可分為:
多通道接收機
序貫通道接收機
多路多用通道接收機
4.2.4按接收機工作原理分類
碼相關型接收機
碼相關型接收機是利用碼相關技術得到偽距觀測值。
平方型接收機
平方型接收機是利用載波信號的平方技術去掉調製信號,來恢復完整的載波信號通過相位計測定接收機內產生的載波信號與接收到的載波信號之間的相位差,測定偽距觀測值。
混合型接收機
這種儀器是綜合上述兩種接收機的優點,既可以得到碼相位偽距,也可以得到載波相位觀測值。
干涉型接收機
這種接收機是將GPS衛星作為射電源,採用干涉測量方法,測定兩個測站間距離。
經過20餘年的實踐證明,GPS系統是一個高精度、全天候和全球性的無線電導航、定位和定時的多功能系統。GPS技術已經發展成為多領域、多模式、多用途、多機型的國際性高新技術產業。
測地型
測地型接收機主要用於精密大地測量和精密工程測量。這類儀器主要採用載波相位觀測值進行相對定位,定位精度高。儀器結構複雜,價格較貴。根據使用用途和精度,又分為靜態(單頻)接收機和動態(雙頻)接收機即RTK。車載
當通過硬體和軟體做成GPS定位終端用於車輛定位的時候,稱為車載GPS,但光有定位還不行,還要把這個定位信息傳到報警中心或者車載GPS持有人那裡,我們稱為第三方。所以GPS定位系統中還包含了GSM網路通訊(手機通訊),通過GSM網路用簡訊的方式把衛星定位信息傳送到第三方。通過微機解讀簡訊電文,在電子地圖上顯示車輛位置。這樣就實現了車載GPS定位。與此同時,在車上安裝相應的探測感測器,利用車載GPS定位的GSM網路通訊功能,同樣能把防盜報警信息傳送到第三方,或者把這個報警電話、簡訊直接傳送到車主手機上,完成車載GPS防盜報警。這裡可以看出,車載GPS定位的GSM網路部分實際上是一個智慧型手機,可以和第三方互相通訊,還可以把車輛被搶,司機被劫、被綁架等信息傳送到第三方。所以說車載GPS定位是定位、防盜、防劫的。市場銷售很廣闊,經常被大家提及的是一般的民用的導航gps,這樣的gps主要是給汽車定位,導航。越來越發達的道路,錯綜複雜的高架橋給駕駛者越來越難分辨道路。導航車載gps的確是給駕駛者帶來了極大的方便!
而且導航gps還具有提前預警電子眼、查詢全國旅遊景點、酒店等服務。的確是旅遊帶來了極大的方便!
◆類似車載GPS
類似車載GPS終端的還有定位手機、個人定位器等。GPS衛星定位由於要通過第三方定位服務,所以要交納不等的月/年服務費。
所有的GPS定位終端,都沒有導航功能。因為再需要增加硬體和軟體,成本提高。
我們在電視裡看到的車載GPS廣告,和上述的車載GPS完全是兩回事。它是一種GPS導航產品,當需要導航時,首先定位,也就是導航的起點,這與真正的GPS定位是不同的,它不能把定位信息傳送到第三方和持有人那裡,因為導航儀中缺少手機功能。比如你把導航儀放在車裡,你朋友把車借開走了,導航儀不能發信息給你,那你就無法查找車輛位置。所以導航儀是不能定位的。
你說我買的是導航手機該行了吧,你想想,你把導航手機放在車上,車被盜了,那個手機會自己給你或第三方打電話發簡訊嗎?它是需要人來操作的。所以說導航終端都沒有定位功能。
導航終端可以導航路線,讓你在陌生的地方不迷路,劃出路線讓你到達目的地,告訴你自己當前位置,和周邊的設施等等。
中國在GPS應該上取得了很大的市場.其中有很多公司是導航的.但是也有在GPS行業做定位管理的。
各種GPS/GIS/GSM/GPRS車輛監控系統軟體、GSM和GPRS移動智慧型車載終端、系統的二次開發車輛監控系統整體搭建方案.系統廣泛套用於公安,醫療,消防,交通,物流等領域。該方案基於NXP的PNX1090Nexperia移動多媒體處理器硬體和由NXP與合作夥伴ALKTechnologies聯合開發的軟體。NXP聲稱,該方案提供了設計師搭建一個帶導航能力的低成本、多媒體功能豐富的攜帶型媒體播放器所需的一切,這些多媒體功能包括:MP3播放、標準和高清晰度視頻播放和錄製、FM收音、圖像存儲和遊戲。NXP以其運行於PNX0190上的swGPSPersonal軟體來實現GPS計算,從而取代了一個GPS基帶處理器,進而降低了材料清單(BOM)成本並支持現場升級。
跟隨GPS的一系列關聯的套用都設計到數學和算法,和GIS系統,地圖投影,坐標系轉換!
由於衛星運行軌道、衛星時鐘存在誤差,大氣對流層、電離層對信號的影響,以及人為的SA保護政策,使得民用GPS的定位精度只有100米。為提高定位精度,普遍採用差分GPS(DGPS)技術,建立基準站(差分台)進行GPS觀測,利用已知的基準站精確坐標,與觀測值進行比較,從而得出一修正數,並對外發布。接收機收到該修正數後,與自身的觀測值進行比較,消去大部分誤差,得到一個比較準確的位置。實驗表明,利用差分GPS(DGPS),定位精度可提高到5米。
預警器
GPS預警器是通過GPS衛星在GPS預警器中設定坐標來完成的,比如遇到一個電子眼,然後通過相關設備在電子眼的正下方設立一個坐標,這樣,使得裝上這個坐標點數據的預警器到達這個點時,在達到坐標點的前300米左右就會開始預警,告訴車主前面有電子眼測速,不能超速駕駛,這樣就起到一個預警作用。這樣的準確率跟數據點的多少是有關係的,主要就是利用衛星的定位來實現了。試機辨真假
記者通過汽車美容店的一朋友協助,挑選了4款所謂的“GPS預警機”,通過調研和試機對比,確認其中一款是冒牌GPS的“電子狗”。並得出以下結論:
A.GPS預警器:一個預警點報警一次,單向預警;定點報警,不受干擾;預警準確率可達98%以上。可選擇的音樂和語音種類多,音質較好。
B.假GPS預警器:同一個預警點報警兩次(駛向預警點和離開預警點都報警);會受某些公共設施如電塔干擾誤報警;多有漏報,準確性率低不足70%;報警音樂和語音單一,音質較差
GPStar智慧型GPS系統
主要由兩大部分組成,即:本地的監控中心軟體管理平台和遠程的GPS智慧型車載終端。遠程的GPS智慧型車載終端將車輛所處的位置信息、運行速度、運行軌跡等數據傳回到監控中心,監控中心接收到這些數據後,會立即進行分析、比對等處理,並將處理結果以正常信息或者報警信息兩類形式顯示給管理員,由管理員決定是否要對目標車輛採取必要措施。
新世紀
進入21世紀,全球定位系統(GPS)在各方面的套用都將加強和發展。本文對GPS走向21世紀時的最新發展情況,特別是當前國際GPS服務(1GS)的產品內容、套用和服務等方面作重點介紹。一、GPS連續運行站網和綜合服務系統的發展
在全球地基GPS連續運行站(約200個)的基礎上所組成的IGS(InternationalGPSService),是GPS連續運行站網和綜合服務系統的範例。它無償向全球用戶提供GPS各種信息,如GPS精密星曆、快速星曆、預報星曆、IGS站坐標及其運動速率、IGS站所接收的GPS信號的相位和偽距數據、地球自轉速率等。這些信息在大地測量和地球動力學方面支持了無數的科學項目,包括電離層、氣象、參考框架、精密時間傳遞、高分辨的推算地球自轉速率及其變化、地殼運動等。
(1)IGS現在提供的軌道有三類:一是最終(精密)軌道,要在10—12天以後得到它,常用於精密定位;二是快報軌道,要在1天以後得到,它常用於大氣的水汽含量、電離層計算等;還有一類是預報軌道。
關於對GPS星鍾偏差方面的估計,只有兩個IGS分析中心提供。IGS近200個永久連續運行的全球跟蹤站中,使用的外部頻率標準近70個,其中約30個使用氫鍾,約20個使用銫原子鐘,約20個使用銣原子鐘,其餘的使用GPS內部的晶體震盪器。
(2)IGS還提供極移和世界時信息。IGS公布的最終的每日極坐標(x,y),其精度為±0.1mas,快報的相應精度為±0.2mas。GPS作為一種空間大地測量技術,本身並不具備測定世界時(UT)的功能,但由於一方面GPS衛星軌道參數和UT相關,另一方面,也和測定地球自轉速率有關,而自轉速率又是UT的時間導數,因此IGS仍能給出每天的日長(LOD)值。IGS還能進一步求定章動項和高解析度的極移(達每2小時1次,而不是1天1次),後者主要源於IGS各觀測站觀測質量的提高,數據傳輸迅速和及時,以及數據處理方法的改進,並沒有本質的改變,而前者卻是技術上的一個跨躍。
(3)IGS提供的一個極為有用和重要的信息是IGS的那些連續運行站(跟蹤站)的坐標、相應的框架、曆元和站移動速度。前者精度好於1cm,後者精度好於1mm/y。IGS站坐標所採用的坐標參考框架是和IERS互相協調的。1993年末開始使用ITRF91,1994年使用ITRF92,1995年到1996年中期使用ITRF93,1996年中期到1998年4月一直使用ITRF94,1998年3月1日轉而採用ITRF96,1999年8月1日開始IGS採用ITRF97。
(4)IGS在測定短期章動方面的新貢獻。
GPS技術不能確定UT,而只能確定日長。同樣這一原則也適用於章動,即GPS數據不能測定章動的經度和傾角,但能確定這些量的時間變率(對時間的導數)。基於這一原理,用了3年的每天的ψ和ε值的資料,估算短期章動項的章動振幅,並與VLBI結果作了比較。結論認為,就測定章動短周期項而言,GPS方法優於VLBI,而對超過1個月以上的長周期而言,VLBI較優。
由於對GPS技術的IGS作出了如此大的成績和貢獻,因此1999年9月各國的VLBI站和SLR站決定也組織類似於IGS的相應的IVS和IVRS。法國的DORIS和德國的PRARE也正在考慮成立類似模式的國際組織。力求使這類空間大地測量觀測系統組織起來,提高效率、提高精度和可靠性。
就地區性的GPS連續運行站網和綜合服務系統而言,已開發國家也已做了很多這方面工作,取得了進展。在美國布設了GPS“連續運行參考站”(CORS)系統。它由美國大地測量局(NGS)負責,該系統的當前目標是(1)使美國各地的全部用戶能更方便的利用它來達到厘米級水平的定位和導航;(2)促進用戶利用CORS來發展GIS;(3)監測地殼形變;④求定大氣中水汽分布;⑤監測電離層中自由電子濃度和分布。
截止1999年9月CORS已有156個站,而美國NGS宣布為了強化CORS系統,以每個月增加3個站的速度來改善該系統的空間覆蓋率。此外,CORS的數據和信息包括接收的偽距和相位信息、站坐標、站移動速率矢量、GPS星氣、站四周的氣象數據等,用戶可以通過信息網路,如Internet很容易下載而得到。
英國建立的“連續運行GPS參考站”(COGPS)系統的功能和目標類似於上述CORS,但結合英國本土情況還多了一項監測英倫三島周圍的海平面相對和絕對變化的任務。英國的COGPS由測繪局、環保局、氣象局、農業部、海洋實驗室共同負責。已有近30個GPS連續運行站,今後的打算是擴建COGPS系統和建立一個中心,其主要任務是傳輸、提供、歸檔、處理和分析GPS各站數據。
日本已建成全國近1200個GPS連續運行站網的綜合服務系統。它在以監測地殼形變、預報地震為主功能的基礎上,結合氣象和大氣部門開展GPS大氣學的服務。
二、GPS套用於電離層監測
GPS在監測電離層方面的套用,也是GPS空間氣象學的開端。太空中充滿了電漿、宇宙線粒子、各種波段的電磁輻射,由於太陽常在1秒鐘內拋出百萬噸量級的帶電物,電離層由此而受到強烈干擾,這是空間氣象學研究的一個對象。通過測定電離層對GPS訊號的延遲來確定在單位體積內總自由電子含量(TEC),以建立全球的電離層數字模型。
GPS衛星發射L1和L2。兩個載波。由這兩個載波可以削弱電離層對GPS定位的影響,或者說可以求定電離層折射。因為這一折射和載波頻率有關。
當人們建立地區或全球電離層數字模型時,總是作簡化的假定,所有自由電子含量都表示在一個單層面上,該面離地面高為H。這樣的話,電子含量正可以用在接收機和衛星連線與此單層面交點(刺入點)處的電子含量Es表示,它可以視為E與刺入點處天頂距Z'的函式EcosZ'=Es。可以將在球面上的電子濃度Es加以模型化,例如寫成經緯度的球諧函式等,這方面有很多專家提出了各種模型。IGS提出了一種電離層地圖的交換格式(10nosphereMapExchangeFormat,IONEX—Format),它的作用是使基於各種理論和技術所獲得的電離層地圖能在統一規格的基礎上進行綜合和比較。電離層模型有各不相同的理論基礎,而取得的數據來源的技術也不同,數據覆蓋面也不完整,所以只能將IGS和全球各種TEC的圖和GPS衛星訊號的差分碼偏差(differentialcodebiases—DCBS)用IONEX形式向全世界用戶提供,下一步將通過比較,逐步聯合起來。
三、GPS套用於對流層監測
在GPS套用中,早期主要是軌道誤差影響定位精度,而且早期的GPS基線相對來說比較短,高差不大,因此對對流層的研究沒有給予很大的重視。直到由於GPS軌道精度大大提高后,對流層折射已成為限制GPS定位精度提高的一個重要障礙。假設一個高程基本為零的地區,接收機所接收的GPS訊號從天頂方向傳來的話,其延遲可以達到2.2—2.6m這一量級,而2小時內這一延遲變化可達10cm不是少見的(所以IGS分析中心提供的對流層參數是用2小時間隔一次)。也由於這個實際情況,對流層折射要顧及其隨機過程的變化來加以模型化。
在GPS套用於對流層研究中,IGS的快速軌道和預報軌道信息對於天氣預報會起重大作用。此外,IGS通過德國GFZ的“IGS對流層比較和協調中心”提供的每2小時的對流層天頂延遲系列就象是控制點,對於區域性或局部性的對流層研究來說,可以起到對流層延遲絕對值的標定作用。
與地基GPS大氣監測不同,星基或空基GPS掩星法測定氣象的技術有覆蓋面廣,垂直分辨好,數據獲取速度快的優點。這一技術的原理是將GPS接收機放在某一低軌衛星(LEO)或飛行器的平台上,該GPS接收機一方面起到對該衛星(或飛行器)精確定軌的作用,同時又套用GPS掩星技術起到大氣探測器的作用。在1997年進行的GPS/MET研究項目,證實了這個構想是可行的。預定於2000年4月發射的CHAMP衛星要利用GPS掩星法進行全球對流層折射(包括大氣可降水分)的測定。
在今後幾年中,還有阿根廷的SAC—C,中國台灣的COS—MIC,這些LEO衛星都要用星載GPS來定軌和利用掩星法測大氣。
今後利用星載GPS的氣象和電子濃度截面數值,結合地面GPS站數據,作成層折圖像提供使用。今後3年中GPS/MET項目研究還要進行6次,預計它將在天氣預報、空間天氣預報、氣象監測方面做出巨大貢獻。
四、GPS作為衛星測高儀的套用
多路徑效應是GPS定位中的一種噪音,至今仍是高精度GPS定位中一個很不容易解決的“干擾”。過去幾年利用大氣對GPS信號延遲的噪聲發展了GPS大氣學,也正在利用GPS定位中的多路徑效應發展GPS測高技術,即利用空載GPS作為測高儀進行測高。它是通過利用海面或冰面所反射的GPS信號,求定海面或冰面地形,測定波浪形態,洋流速度和方向。通常衛星測高或空載測高測的是一個點,連續測量結果在反向面上是一個截面,而GPS測高則是測量有一定寬度的帶,因此可以測定反射表面的起伏(地形)。據報告,試驗時在空載平面安裝2台GPS接收機,1台天線向上用於對載體的定位,1台天線向下,用於接收GPS在反射面上的訊號。美國在海上作了測定洋流和波浪的試驗。丹麥在格凌蘭作了測定冰面地形及其變化的試驗。
五、衛星一衛星追蹤技術
衛星對衛星的追蹤(SST)技術的實質是高解析度的測定2顆衛星間的距離變化,一般它分為兩類,即高低衛星追蹤和低低衛星追蹤。前一類是高軌衛星(如對地靜止衛星,GPS衛星等)追蹤低軌(LEO)衛星或空間飛行器,後一類是處於大體為同一低軌道(LEO)上的2顆衛星之間的追蹤,2顆衛星間可以相距數百千米,這兩類SST技術都將LEO衛星作為地球重力場的感測器,以衛星間單向或雙向的微波測距系統測定衛星間的相對速度及其變率。這一速度的不規則變化所反映的信息中,就包含了地球重力場信息。衛星軌道愈低,這一速度變化受重力場的影響愈明顯,所反映重力場的解析度也愈高。
這兩類SST技術中,以高低衛星追蹤所獲得的信息比較豐富,這是因為:
高軌衛星,特別是有多個高軌衛星(如GPS)能獲得低軌衛星處於大部分軌道上所傳遞的信息;(2)對地面重力場的中波、長波、短波信息都能恢復;(3)不同於低軌衛星,高軌衛星受重力場影響比較小,因此衛星間速度變化能比較好的反映重力場信息,同時高衛星的軌道也比較容易精確的求定。
SST技術的第一次試驗是在1975年進行的,高軌衛星是對地靜止衛星(GEO)ETS一6,而低軌衛星為NIMBUS—6和APOLLO—SYYUS,但由於觀測值的解析度和精度太低(低於10μm/s),而沒有取得很滿意的成果,因此NASA放棄了此項研究;一直到1991年,利用GPS衛星作高軌衛星再次進行了試驗,用LANDSAT作為低軌衛星,在該衛星平面上裝GPS接收機,進行定軌和測定高低衛星間距離及其變率的試驗,後來在T/P海洋測高衛星上也作過類似試驗,也由於測定距離及其變率的解析度和精度不高,而沒有令人滿意的結果;這次歐空局(ESA)在德國(GFZ)主持下所發射的CHAMP,GRACE和GOCE3顆衛星,在今後10年中將專門進行SST和衛星重力梯度測量(SGG)的試驗,以改善對地球重力場的認識。
IGS認為持續地支持低軌衛星(LEO)是它的一項重要任務方面,因此專門建立了LEO工作組。LEO工作組制定了工作計畫,並提出了一些建議:①建立IGS為追蹤LEO的相應標準化地面站網,以滿足LEO的要求;②IGS以短於24小時速率,對這些地面站網的數據進行傳輸和處理,提供LEO所需要的數據和產品;③為地面站網的GPS1Hz採樣率數據建立相應的GPS數據交換格式;④了解調查IGS精密軌道對LEO平台上GPS數據採集的作用和意義。
1994年GPS就全面進入正式運行,該系統由21顆衛星組成,分別沿6個軌道平面運行,還有3顆衛星一直處於熱備份狀態,總計24顆.但在軌道上運行的GPS衛星總數實際上是變動的,在1998年就有27顆GPS衛星在軌道上運行.若從與赤道面55°傾角算第一個軌道面,則其他5個軌道面均以此為基礎,彼此各以60°角度相交。
(2)關於對GPS星鍾偏差方面的估計,只有兩個IGS分析中心提供。IGS近200個永久連續運行的全球跟蹤站中,使用的外部頻率標準近70個,其中約30個使用氫鍾,約20個使用銫原子鐘,約20個使用銣原子鐘,其餘的使用GPS內部的晶體震盪器。
(3)IGS還提供極移和世界時信息(參見表1)。IGS公布的最終的每日極坐標(x,y),其精度為±0.1mas,快報的相應精度為±0.2mas。GPS作為一種空間大地測量技術,本身並不具備測定世界時(UT)的功能,但由於一方面GPS衛星軌道參數和UT相關,另一方面,也和測定地球自轉速率有關,而自轉速率又是UT的時間導數,因此IGS仍能給出每天的日長(LOD)值。IGS還能進一步求定章動項和高解析度的極移(達每2小時1次,而不是1天1次),後者主要源於IGS各觀測站觀測質量的提高,數據傳輸迅速和及時,以及數據處理方法的改進,並沒有本質的改變,而前者卻是技術上的一個跨躍。
(4)IGS提供的一個極為有用和重要的信息是IGS的那些連續運行站(跟蹤站)的坐標,相應的框架,曆元和站移動速率,前者精度好於1cm,後者精度好於1mma。IGS站坐標所採用的坐標參考框架是和IERS互相協調的。1993年末開始使用ITRF91,1994年使用ITRF92,1995年到1996年中期使用ITRF93,1996年中期到1998年4月一直使用ITRF94,1998年3月1日轉而採用ITRF96,1999年8月1日開始IGS採用1TRF97。
(5)IGS在測定短期章動方面的新貢獻。眾所周知,地球自轉軸在地球表面上的移動稱為極移,而它在慣性空間中的運動稱為歲差和章動。GPS技術不能確定UT,而只能確定日長。同樣這一原則也適用於章動,即GPS數據不能測定章動的經度和傾角,但能確定這些量的時間變率(對時間的導數)。基於這一原理,用了3年的每天的W和E值的資料,估算短期章動項的章動振幅,並與VLBI結果作了比較,結論認為,就測定章動短周期項而言,GPS方法優於VLBI,而對超過一個月以上的長周期而言,VLBI較優。
由於對於GPS技術的IGS作出了如此大的成績和貢獻,因此在1999年9月各國的VLBI站和SLR站決定組織類似於IGS的相應的IVS和ILRS。法國的DORIS和德國的PRARE也正在考慮成立類似模式的國際組織.力求使這類空間大地測量觀測系統組織起來,提高效率,提高精度和可靠性。
發展趨勢
GPS今後的發展趨勢將體現在以下幾方面:●衛星系統的更新與多個衛星定位系統共存,將明顯改善衛星導航定位的精度和可靠性。
●雙頻高精度測地型接收機將繼續高度壟斷在幾個技術領先的GPS廠家手中,美國將繼續保持其絕對優勢。
●單頻測地型接收機和導航接收機OEM板產業將擴散到世界各地,雖是低檔次的GPS產品,但用途廣、用戶多、市場大。美國把GPS單頻OEM板的生產技術轉讓出口,因而推動了世界各地企業投資GPSOEM的生產。
●陸地導航定位產品將成為發展最快的GPS產業。
●21世紀後定位系統將向著多系統相互競爭與補充的方向發展。
四大系統
 美國GPS
美國GPS數量:由24顆衛星組成;軌道:高度約20200公里,分布在6條交點互隔60度的軌道面上;精度:約為10米;用途:軍民兩用;進展:1993年全部建成,正在實驗第二代衛星系統,計畫發射20顆衛星,定位精度將達1毫米。
 歐洲“伽利略”定位系統
歐洲“伽利略”定位系統③俄羅斯GLONASS衛星導航系統數量:24顆衛星組成;精度:10米左右;用途:軍民兩用;進展:2007年已有17顆衛星在軌運行,計畫2008年全部部署到位。
④中國“北斗”衛星導航系統數量:3顆衛星組成,2顆為工作衛星,1顆為備用衛星;用途:軍民兩用;進展:前兩顆分別於2000年和2003年發射成功。進展:2012年12月27日,北斗衛星導航系統正式運行。
