
基本概念
自適應控制
自適應控制的研究對象是具有一定程度不確定性的系統,這裡所謂的“不確定性”是指描述被控對象及其環境的數學模型不是完全確定的,其中包含一些未知因素和隨機因素。
任何一個實際系統都具有不同程度的不確定性,這些不確定性有時表現在系統內部,有時表現在系統的外部。從系統內部來講,描述被控對象的數學模型的結構和參數,設計者事先並不一定能準確知道。作為外部環境對系統的影響,可以等效地用許多擾動來表示。這些擾動通常是不可預測的。此外,還有一些測量時產生的不確定因素進入系統。面對這些客觀存在的各式各樣的不確定性,如何設計適當的控制作用,使得某一指定的性能指標達到並保持最優或者近似最優,這就是自適應控制所要研究解決的問題。
自適應控制和常規的反饋控制和最優控制一樣,也是一種基於數學模型的控制方法,所不同的只是自適應控制所依據的關於模型和擾動的先驗知識比較少,需要在系統的運行過程中去不斷提取有關模型的信息,使模型逐步完善。具體地說,可以依據對象的輸入輸出數據,不斷地辨識模型參數,這個過程稱為系統的線上辯識。隨著生產過程的不斷進行,通過線上辯識,模型會變得越來越準確,越來越接近於實際。既然模型在不斷的改進,顯然,基於這種模型綜合出來的控制作用也將隨之不斷的改進。在這個意義下,控制系統具有一定的適應能力。比如說,當系統在設計階段,由於對象特性的初始信息比較缺乏,系統在剛開始投入運行時可能性能不理想,但是只要經過一段時間的運行,通過線上辯識和控制以後,控制系統逐漸適應,最終將自身調整到一個滿意的工作狀態。再比如某些控制對象,其特性可能在運行過程中要發生較大的變化,但通過線上辯識和改變控制器參數,系統也能逐漸適應。
常規的反饋控制系統對於系統內部特性的變化和外部擾動的影響都具有一定的抑制能力,但是由於控制器參數是固定的,所以當系統內部特性變化或者外部擾動的變化幅度很大時,系統的性能常常會大幅度下降,甚至是不穩定。所以對那些對象特性或擾動特性變化範圍很大,同時又要求經常保持高性能指標的一類系統,採取自適應控制是合適的。但是同時也應當指出,自適應控制比常規反饋控制要複雜的多,成本也高的多,因此只是在用常規反饋達不到所期望的性能時,才會考慮採用。
同步控制
同步控制是和異步控制相對而言的,同步控制的led顯示屏在發布和更新內容時,和控制電腦的顯示器內容一致,電腦一旦關機則顯示屏相應也要關閉。異步控制系統的則不用,一旦發布好內容,連線顯示屏的控制電腦關了之後並不影響顯示屏的發布。
同步控制是一種常用到的工控技術,同步,顧名思義就是要按照一定比率來協調主機和從機之間的位置、轉速、扭矩等量。
多台電機的同步運行問題套用較為廣泛,尤其在多單元生產流水線中及驅動同一負載時居多,但對具體的套用,會有不同的要求。若採用變頻器及相關配套產品,可較有效地實現不同功能。這裡說的配套產品包括:控制電器、變頻器輔助選件、感測器、PLC等。
同步控制器一般有兩類。一類是和張力系統連同一起來使用的,張力控制器也是一種同步控制器件,這類型的同步是以轉速和扭矩等量的同步來實現的;
另一類是空間定位控制器,就是位置同步,一般套用於機器人,數控工具機,飛剪等系統的軸間聯動使用,是一種軸間的位置跟蹤定位。
目前同步控制器有嵌入式設定參數的,也有直接可程式類的,隨著技術的發展,可程式類的套用慢慢超過了前者,代表者同步技術的發展方向,它可以通過現場匯流排等通訊技術和其他設備進行連線和操作。
變頻器本身就是一個計算機控制系統,每一種型號的變頻器通常適合驅動特定性質的負載。而對於相同負載性質的不同套用需求,希望能夠調整變頻器參數以滿足工藝要求。因此,各種型號的變頻器都為用戶提供了變頻器參數調整的手段。參數調整的方法可以通過配套的操作面板手動離線進行,也可以通過通信的方法線上進行。
研究現狀
自適應控制
為了設計一個滿意的控制系統,不論是通常的反饋控制系統,還是最優控制系統,必須事先掌握描述系統運動規律的數學模型及其隨環境等變動的情況,否則,用一般的反饋控制方法或最優控制方法是難於設計出滿意的控制系統。然而,某些被控對象的數學模型及其環境情況難以明確描述,某些被控對象的特性和環境在系統運行中會發生不可預測的變動,而這是設計者所不能完全掌握的。這些情況的存在,很自然地促使人們產生兩種想法:一種是人們根據所有參數都事先設計好,這種方法的代表就是PID調節器;另一種想法就是設計出這樣一種調節器或控制器,它不需要人們在現場不斷調節,不需要事先詳知被控對象的特性,而能在系統運行中自己辨識對象,自行調節控制器本身的結構和參數來滿足系統性能的要求,這就是自適應控制思想。利用自適應控制能夠解決一些常規的反饋控制所不能解決的複雜控制問題,能大幅度地提供系統的穩定精度和跟蹤精度。
在50年代末,由於飛行控制的需要,美國麻省理工學院(MIT)懷特克教授( W hitaker)首先提出飛機自動駕駛儀的模型參考自適應控制方案,稱為MIT方案。在該方案中採用局部參數最佳化理論設計自適應控制規律,這一方案沒有得到實際套用。用局部參數最佳化方法設計模型參考自適應系統,還需檢驗其穩定性,這就限制了這一方法的套用。在1966年德國學者帕克斯(P.C.Parks)提出採用李雅普諾夫(A.M.Liapunov)第二法來推導自適應算法,以保證自適應系統全局漸近穩定。在用被控對象的輸入輸出構成自適應規律時,在自適應規律中包含輸入和輸出的各階導數,這就降低了自適應對干擾的抑制能力。為了避免這一缺點,印度學者納朗特蘭(K.S.Narendra)和其他學者提出各自的不同方案。羅馬尼亞學者波波夫(V.M.Popov)在1963年提出超穩定性理論,法國學者蘭道(I.D.Landau) 把超穩定性理論套用到模型參考自適應控制中來。用超穩定性理論設計的模型參考自適應系統是全局漸近穩定的。
自校正調節器是在1973年由瑞典學者阿斯特羅姆(K.J.Astrom) }3z」和威特馬克(B . Wittenmark)首先提出來的。1975年克拉開(D.W.Clark)等提出自校正控制器。1979年威爾斯特德(P.E.Wellstead)和阿斯特羅姆提出極點配置自校正調節器和伺服系統的設計方案。最早的直接成果是阿斯特羅姆教授在造紙廠獲得成功套用的自校正調節器。從那以後至80年代以前,有關自適應控制的論文雖然很多,但實際成果套用的例子僅有6個:
1)1974年,吉爾巴特和紋斯頓(Gilbart and Winston)利用模型參考自適應控制,使一種光學望遠鏡的精度提高了5倍以上;
2)1974年,博里森和西丁(Borrison and Syding)在200kW的礦石破碎機中採用自校正控制,使產量提高了約10%;
3)1975年,塞格拉爾和赫德奎斯特(Cegrall and Hedquist)利用類似的自適應方案,改進了造紙機濕度控制迴路的性能;
4)1978年,杜蒙和比朗格(Dnmont and Belanger)使工業二氧化欽窯的靜態性能改善了10%,動態性能也有改進;
5)1979年,卡爾斯特拉姆等(Kallstrom et al.)在35.5萬噸的油輪上採用自校正駕駛控制,使速度提高了;
6)1980年,阿默翁根(Amerongen)在遠洋測量船上採用模型參考自適應方法,使平均速度略有提高。
自適應控制經過30多年的發展,無論在理論上或在套用上都取得了很大的進展。進入80年代後,由於計算機的迅速發展,特別是微處理機的廣泛普及,為自適應控制的實際套用創造了有利條件。自適應控制在飛行控制、衛星跟蹤望遠鏡的控制、大型油輪的控制、電力拖動、造紙和水泥配料等方面的控制中得到套用。現在,自適應控制在航天、航海、過程控制、電氣傳動、機器人、經濟管理、生物、醫學、交通等多方面都取得了可喜的成果。
同步控制
複雜網路中同步現象的研究己經有了許多年的歷史。最初人們對同步現象的研究主要集中在驅動或禍合的極限環(周期振子)系統的同步(鎖相)問題.早期具有開創性的工作始於Winfree。他假設每個振子只與他周圍有限個振子之間存在強力作用,這樣振子的振幅變化可以忽略,從而將同步問題轉化成研究相位變化的問題。後來,Kuramoto指出,一個具有有限個恆等振子的藕合系統,無論系統內部各個振子之間的禍合強度多么微弱,最終他們都可以達到相位同步。此後,禍合系統間的同步問題開始被人們廣泛的關注。
隨著非線性科學的發展,對同步的概念和基礎理論的研究也日趨完善。因而,對複雜系統同步問題的研究也取得了突飛猛進的進展,已經發現了許多不同種類的同步,並且做了相應的研究,如完全同步(complete synchronization) 、廣義同步(generalized synchronization)(包括投影同步、部分同步、相位同步、滯後同步、頻率同步等)、反同步(anti synchronization)、間歇性滯後同步(intermittent lag synchronization)、弱相同步(imperfect phase synchronization)、幾乎完全同步(almost complete synchronization)、外同步(outer synchronization) 等。這些研究成果使得同步這一概念不但能夠從物理現象中觀察得到,也能夠從物理機制上給出嚴謹的理論證明。同時,在深入的分析複雜網路的拓撲結構之後,發現現實中的大量網路既不是具有不規則網路結構的網路,也不是完全隨機網路,而是具有小世界和無標度等共同特性的複雜網路。所以,人們又開始探尋網路的拓撲結構對網路的同步性能造成的影響。針對具有小世界網路模型和無標度網路模型的複雜網路進行了同步分析。在現有的文獻中,對於複雜網路同步的研究主要分為兩個方面,一個是根據網路本身的拓撲結構,節點的度的分布及聚類係數等特性來研究網路實現同步的能力。另一類則是在給定節點動力學的前提下,考慮在什麼樣的數學準則下能夠實現網路同步。在第一類的問題中,需要通過大量的數值實驗和數理統計的方法來比較各類複雜網路的同步能力和揭示網路動力學演化過程中的不同表現行為。這種研究能夠用數據來說明複雜網路拓撲結構的禍合矩陣的特徵值對系統的同步性能造成的影響。而在進行後一種的研究中。也會涉及到不同拓撲結構的情況。通常在不同的拓撲結構下,得到的能夠使網路實現同步的條件也是不相同的。
自適應同步原理
Huberman及Lumer於1990年提出用自適應原理控制混沌的方法。John和Amritker在原方法的基礎上做了改進,用來控制混沌系統的相空間軌跡與所期望的不穩定軌道達到同步,並用此方法研究了Lorenz及Rossler系統,證明該方法是有效的。
具體地說,自適應同步方法就是利用自適應控制技術來自動調整系統的某些參數,使系統達到混沌同步的目的。 所謂混沌同步,指的是對於從不同初始條件出發的兩個混沌系統,隨著時間的推移,它們的軌線逐漸一致。套用這一方法有兩個前提條件:
①系統至少有一個或多個參數可以得到;
②對於所期望的軌道,這些參數值是己知的。
系統中受控參數的調整還取決於兩個因素:
①系統輸出變數與所期望軌道的相應變數的差值;
②受控參數值與所期望的軌道相應的參數值之間的差值。
考慮一個n維的自治系統:
X'=f(μ,X)
式中:X是系統狀態變數,μ是系統參數集。運用參數自適應原理,將系統的方程化為如下形式:
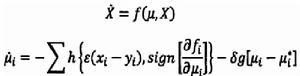 自適應同步控制
自適應同步控制理論上來說,函式h,g可以有很多形式,但是實際上一般取為:
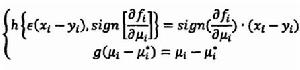 自適應同步控制
自適應同步控制 自適應同步控制
自適應同步控制研究表明,只要第二個式子的Lyapunov指數均為負數,那么X和Y就可以實現同步。最後,可根據Lyapunov函式原理最終確定式第二個式子中係數 的取值範圍。
