
聲學照相機
 用於採集聲音信號的傳聲器陣列系統
用於採集聲音信號的傳聲器陣列系統聲學照相機,又名聲相(像)儀,是利用傳聲器陣列測量一定範圍內的聲場分布的專用設備,可用於測量物體發出的聲音的位置和聲音輻射的狀態,並用雲圖方式顯示出直觀的圖像,即聲成像測量。
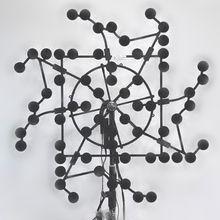
 半消聲室內測量的口哨聲的聲像圖
半消聲室內測量的口哨聲的聲像圖聲成像(acoustic imaging)是基於傳聲器陣列測量技術,通過測量一定空間內的聲波到達各傳聲器的信號相位差異,依據相控陣原理確定聲源的位置,測量聲源的幅值,並以圖像的方式顯示聲源在空間的分布,即取得空間聲場分布雲圖-聲像圖,其中以圖像的顏色和亮度代表聲音的強弱。將聲像圖與陣列上配裝的攝像實所拍的視頻圖像以透明的方式疊合在一起,就形成了可直觀分析被測物產生噪聲狀態。這種利用聲學、電子學和信息處理等技術,將聲音變換成人眼可見的圖像的技術可以幫助人們直觀地認識聲場、聲波、聲源,便捷地了解機器設備產生噪聲的部位和原因,物體(機器設備)的聲像反映了其所處的狀態。
聲成像的研究開始於20世紀20年代末期。最早使用的方法是液面形變法。隨後,很多種聲成像方法相繼出現,至70年代已形成一些較為成熟的方法,並有了大量的商品化產品。聲成像方法可分為主動聲成像、掃描聲成像和聲全息。
由於很多聲檢測器均能記錄聲波的幅度和相位,並將其轉換成相應的電信號,記錄換能器陣列各單元接收信號的幅度和相位,即可重現物體聲像。
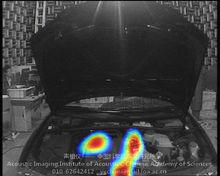 聲相儀測量汽車噪聲的聲像圖
聲相儀測量汽車噪聲的聲像圖聲成像質量的主要指標有圖像的解析度、信噪比、畸變和虛像等。聲成像的質量不僅與所用的儀器設備有關,而且在很大程度上還與聲波在介質中傳播的特性(如反射、折射和波型轉換)有關。
傳聲器陣列發展史
傳聲器陣列檢測技術最早套用於目標探測與跟蹤。
法國科學家Sergeant Jean Perrin最早設計了採用12個傳聲器的探測陣列,其中每6個傳聲器構成一個圓陣,兩個完全一樣的圓陣相距一定距離組成雙陣,該陣可通過人耳監聽的方法確定聲源方位和距離,並因此而獲得諾貝爾物理學獎,這是人類最早將聲探測陣列技術成功地套用。
隨著微型測量傳聲器技術的發展,傳聲器陣列朝著多元化、小型化發展,先進數位訊號處理技術的發展推動了傳聲器陣列技術朝著智慧型化發展,利用圖像顯示聲源位置和強度的方式比單純聽一個傳聲器的聲音和看一個傳聲器的信號波形更直觀,能夠提取到更多有用的信息。現代快速信號處理技術更可以使得傳聲器陣列可以實時分離檢測多個聲源,用於測量可記錄複雜的聲場,用於分析機器設備的多聲源特性可以提高對機器設備的故障診斷能力,這正是傳聲器陣列發展的生命力。
聲相儀的指標定義
1. 本底噪聲
是指發生在測量或記錄中與信號存在與否無關的一切干擾聲音信號,在此主要由畸變引起的本底噪聲、電路熱噪聲和量程過大造成的量化誤差引起的噪聲。
2. 動態範圍
由單個傳聲器本身特性決定。是指聲相儀工作時能夠接收到的最小信號和在無非線性失真情況下最大聲壓之間的範圍,以dB表示。
3. 頻率範圍(上限頻率、下限頻率)
聲相儀上限頻率由陣列的陣元的最小間距決定,定義為在攝像頭視角範圍內不出現聲源虛像的最高頻率,其理論值是最小半波長應大於最小陣元間距;
聲相儀下限頻率由陣列的分辨能力決定,定義為當兩個聲源位置處於攝像頭視角邊緣,聲相儀所能夠分辨出兩個聲源的最低頻率,其理論值是最大半波長應小於陣列孔徑。
4. 主瓣寬度(°)
主瓣寬度是表示波束圖中主瓣尖銳程度的參數。通常用波束圖中的半功率點或主瓣的零點之間的對應的角度量度。3dB指向角指在以聲相儀的指向性函式β(θ,φ)從最大值降低3dB(幅值降低一半)所對應的方位角和仰角(θ1,φ1)範圍。對於具有對稱性能的陣列通常以(±θ1,±φ1)表示。也可以用6dB指向角或者12dB指向角來表示。
5. 聲相儀的角解析度(°)
聲相儀角解析度是以波束主瓣寬度來量度,通常定義為主瓣的兩個零點之間的角度範圍,或主瓣半功率點之間的角度範圍。小的主瓣寬度給出更好的角度解析度。
6. 旁瓣抑制(-dB)
由於主瓣以外的第一個旁瓣是所有旁瓣中幅度回響最大的一個,因此用第一個旁瓣的相對於主瓣的高低差來定義其旁瓣級。旁瓣級決定了聲相儀對觀測方向以外方向上到干擾達信號的抑制能力。
7.陣列增益(dB)
聲相儀增益定義為傳聲器陣列輸出信噪比與陣元輸出信噪比之比,對於m元平面陣列或者線陣列,假設噪聲是完全不相關時,陣列增益為:
8. 信號增強
陣列對正前方向聲波測量輸出的放大量,即相對於個傳聲器測量的信號增益,以dB表示。對於m元平面陣列或者線陣列:
Gain=20lgm
9. 指向性函式β(θ,φ)
在以聲相儀的等效中心為球心的大球面上,不同方位(θ,φ)處的聲壓幅值p(θ,φ)與最大回響方向上的聲壓幅值p(θ0,φ0)之比稱為聲相儀的指向性函式β(θ,φ) 。
10. 聲像與視頻偏離度(°)
指陣上視頻圖像與陣列計算所得出的聲像圖重疊時的偏差,通常以°為單位。陣列需要用一下標準源來校驗,該準源為一個無限小聲源,且聲音強度足夠大,可以發出單頻(如1kHz)正弦聲音和較高亮度的光,聲音的頻率最好可以在一定範圍(如100Hz-10kHz)內調節。
11.回響速度(秒/幀)
指聲相儀取得一幀聲像圖所需要的時間,反映聲相儀的信號處理速度,一般為毫秒級,能讓人眼感覺圖像連續變化的速度是40ms。市面上也有一些價格較低廉的產品,提供秒級的回響速度。
12. 最大探測距離(m)
指聲相儀能夠取得清晰聲像的最遠距離,與聲源的強度和信噪比有關。
13. 最小探測距離(m)
指聲相儀能夠分辨聲源的最小距離,與陣列的結構有關。
14. 視場虛像率(dB)
指視場內出現的最大虛像相對於主聲源的衰減量。
15. 全景虛像率(dB)
指不涉及視頻圖像,由陣列聲成像所涉及的最大範圍內的虛像,相對於主聲源的衰減量,如球形陣的最大範圍是全方向。
