
計算公式
 有效綠燈時間
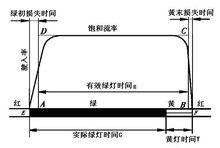
有效綠燈時間綠信比是一個信號相位的有效綠燈時長與周期總時長之比,一般用λ表示。
λ= g/C
式中:λ——綠信比
C——周期時長
g——有效綠燈時長,一般用小寫的g表示,以便和實際綠燈時間(G)區分
注意
在國內很多交通文獻中,將Splits翻譯成綠信比是錯誤的,Splits應該翻譯為“”綠燈時長“ ,即1個信號周期中的“綠燈時間+黃燈時間+全紅時間”,英文全名叫“Phase splits”,沒有比的概念。
最佳化
欠飽和交叉路口延誤及停車次數的表達式。以延誤及停車次數的加權和為目標函式給出周期和綠信比同時最佳化的方法。
孤立交叉路口是城市交通網路的最小單元, 是研究線交通和面交通 ( 網路 ) 的基礎。受信號控制的交叉路口的控制變數是周期和綠信比。儘管已經對交叉路口的實時控制進行了研究, 但由於受到經濟上、道路結構 、 人的因素等的限制, 實時控制並未廣泛套用。因此對交叉路口信號配時的研究仍有重要意義。
由於周期和綠信比的最佳化不是相互獨立的, 而是有一定關聯, 所以用分步尋優的辦法求得的結果不能保證整個交叉路口的真正最優。將討論欠飽和狀態下周期和綠信比同時最佳化的方法。
交叉路口車輛的延誤及停車次數
在欠飽和情況下, 車輛在交叉路口的停車回數小等於1 , 即不會發生重複停車現象。紅燈期間內排隊車輛及綠 燈時間內加入排隊的車輛在綠燈期間能全部消散完畢, 下面以支路1 為例推導延誤 , 停車次數的表達式。
車輛的延誤分為兩部分: 紅燈期間的延誤和綠燈期間的延誤。紅燈期間的延誤 為△OAc的面積, 綠燈期間的延誤為△ABC的面積。綠燈期間車輛按最大離開率離開, 同時又有車輛按平均到達率q 排入隊中, 故綠燈期間等效車輛離開率為S一q
結論
Webstre 以交叉路口車輛延誤為目標函式得出了交叉路口 衡狀態下的最優配時, 但它僅套用於欠飽和狀態 ,且 目標函式有一 定局限性。以後Miller, AkcelikAl -sop對孤立交叉路口的信號配時也分別進行了研究。上面研究的結果與實際並不是完全一致的。A.J.Khalili 研究了給定周期下綠信比的最佳化方法。他所選用的目標函式是車輛在交叉路口處的延誤、停車次數 , 廢氣排放量以及油耗。這些方法決定最優配時是分步進行的, 即先決定最優周期, 再決定該周期下的最優綠信比。
當 C=50秒和C=90秒時的最優綠信比是不一致的, 這就說明了周期和綠信比之間的相互關聯。這是因為在帶 權的目標函式中, 停車次數起主導作用。
最佳化及其套用
在飽和交通狀態下, Webster綠信比最佳化模型要同時消散各方向上的擁擠車流, 忽略飽和與非飽和交通狀態下的車流特徵差異, 導致信號交叉口各個方向上的排隊車輛越來越長, 為此, 提出採用通行優先權的方式, 對交通需求大的方向給予更多的綠燈時間, 以期實現儘快消散該方向上的擁擠車流。各個方向(相位 )通過輪流獲得相位通行優先權進而逐步消散自方向上的擁擠車流, 最終達到預防交通擁擠和快速消散交通擁擠的最佳化目標。仿真實驗證實, 本最佳化方法在處理飽和交通流上較Webster綠信比最佳化模型更有效 。
在飽和交通狀態下 , 由於受周期時長的限制 ,信號交叉口會出現不同程度的擁擠或堵塞現象 ,原因是該時段內的交通需求大於信號交叉口的通行能力 。因此 , 解決信號交叉口的交通擁擠問題關鍵在於提高信號交叉口的通行能力 。
提高信號交叉口的通行能力主要有兩種方法 。一是增加進口道的車道數 , 即拓寬現有路口 ;二是運用技術的手段來提升該路口的通行能力 。
在非飽和交通狀態下, 信號控制的最佳化目標應本著在信號交叉口處的延誤、停車率、排隊長度在非飽和交通狀態下 , 信號控制的最佳化目標應本著在信號交叉口處的延誤 、停車率 、排隊長度等指標最小 , 這就要求配時的周期時長及其綠信比使得交叉口的通行能力稍微高於本交叉口的交通需求為宜。
自適應信號控制系統運行機制
系統的啟動
通過交通調查 , 可以先實施一段時間的分時段固定周期控制方式 , 在此期間 ,車輛檢測器實時採集各個周期內的飽和度 、車輛到達率 、停車率 、排隊長度等數據並加以存儲 , 為籌備過渡到自適應控制方式中所需的基礎數據 。或通過連續的交通調查 , 將調查數據錄入到信號交叉口自適應交通控制系統中 , 用以啟動自適應交通控制系統 。
基礎數據採集
在信號周期的每一次執行過程中, 需實時檢測各進口道的車輛到達數、車流密度、車輛速度、停車率、排隊長度等數據, 這些數據的獲取不完全是直接由車輛檢測器檢測得到的, 有的是通過檢測器檢測信號周期內到達的車輛數及信號周期時長 、飽和度等參數按照一定的數學模型間接求解而得。
交通參數預測
可以採用長時段預測與短時段預測相結合的交通流預測方法, 這是因為:我國車流離散性較大, 車流呈現的無規律性強, 從預測的角度來說, 用時間段較長的統計序列進行預測時, 預測結果的精度較高;而用時間段較短的統計序列進行預測時, 其預測結果的精度較低。
控制參數最佳化
根據預測得到的各項數據首先確定下一周期的交通狀態 , 因為不同的交通狀態其相應的最佳化目標是不同的 。在進行綠燈時間分配時 , 對交通需求大的相位給予更多的通行優先權 。
控制參數輸出
將最佳化的控制參數送入到執行機構 (信號燈 )執行, 在此期間檢測器檢測實際到達的各項交通參數, 一方面用來評價預測數據的可靠性及最佳化結果的有效性, 另一方面也是為下一周期的信號配時設計準備數據。
提出的通行優先權的綠信比最佳化模型, 以預防交通擁擠和儘快消散交通擁擠為最終最佳化目標, 更多地借鑑了交通擁擠情況下的交警執勤經驗。本最佳化模型則是對交通需求大的方向 (相位 )寄予 “厚望 ”, 以此來提高信號交叉口的通行能力。在飽和交通 狀態下, 本模型更接 近交通實際情況, 具有更強的可操作性 。
