
基本概念
結構控制的概念最早是由Kobori和Minai在1960年提出的,美國的T.P.Yao在1972年將現代控制理論套用於結構,確定了主動控制研究的開始。二十幾年過去了,結構控制技術得益於如機械、電子、計算機等方面技術的發展,取得了長足的進步。
結構主動控制是將自動控側科學技術,與結構工程科學技術相結合,實現減輕結構振動的目的。主動控制可以根據人們的期望來調節對結構的振動控制效果,二十多年來,人們對主動控制的研究在逐步深入,從理論分析走向實驗研究,又從試驗走向套用。理論和試驗研究及工程套用均表明:結構主動控制確實能夠有效地減小結構地震反應。
AMD主動控制系統
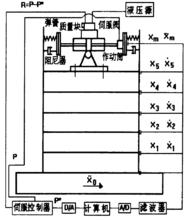
AMD控制系統由測量系統、伺服控制器、計算機、伺服作動器、數據處理、質量、彈簧、阻尼器組成。圖1是AMD控制系統示意圖 。
 結構主動控制
結構主動控制圖1
對結構狀態(結構位移、速度)進行線上測量,信號通過感測器和濾波電路,再經過A/D轉換,將電壓模擬信號轉換成電壓數位訊號,經標度變換,電壓數位訊號轉換為結構的位移、速度;計算機將控制增益矩陣與結構狀態向t相乘,計算出控制力;控制力信號經標度變換轉換為電壓數位訊號;啟動D/A轉換,將電壓數位訊號轉換為電壓模擬信號,並輸出給伺服控制器.在電液伺服系統中,感測器與伺服油缸聯動.感測器的輸出電信號與指令信號在伺服控制器中進行比較,其差值經放大後送至電液伺服閥,伺服閥翰出的高壓油是隨偏差信號的大小和方向變化,因此伺服油缸跟隨偏差信號變化。由於系統接成負反饋,伺服油缸活塞的運動使偏差信號趨於零,活塞才停止運動,從而使伺服油缸活塞跟隨指令信號。當反饋感測器為位移器時,活塞的位置便按指令變化,構成了位t伺服系統。同樣當反饋感測器為力感測器,系統便構成了力伺服系統.本試驗採用力伺服系統。
主動控制的套用
在過去十年中,世界各國對主動控制的研究興趣大大增強了,在這個領域,美國和日本比其它國家領先了一步。主動控制系統可以歸納為質量阻尼器(作動器)類型和非質量阻尼器類型。AMD系統是最流行的質量阻尼器,目前所建成的質量阻尼器系統都是以提高中小地震以及颱風下居住和使用的舒適性為目的的。質量阻尼器還不能夠在實際中單獨抵抗大地震,因為它需要巨大的質量塊和推動它們的巨大能量。己經開發的質量阻尼器系統己將減小結構在橫向和扭轉方向的複雜振動作為控制目的。非質量阻尼器類型包括主動拉索、主動基礎隔震、氣體脈衝發生器、主動可變系統(Active Variable System)、空氣動力學附屬檔案(Aerodynamics Appendage)以及可變動力特性的結構構件和節點。主動拉索和氣體脈衝發生器都被設計成為控制力類型。AVS系統可以改變結構的剛度,人們期待它能被開發成為可以減小大地震時地震荷載的非共振類型,這種類型的控制系統可以大大節省能量。與AVS系統相似,空氣動力學附屬檔案被用來減小風振的強度,以使結構達到非共振的目的。
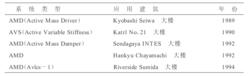
主動控制在結構上的實際套用主要在日本,第一個成果是1989年在東京Kyobashi Seiwa大樓上安裝的AMD系統,後來在日本又建立了多座這樣的建築,具體如表1所示 。
 結構主動控制
結構主動控制表1
研究與發展
轉子的振動控制一直是機械工程領域較重要的研究領域,有研究者建立了主動彈支幹摩擦阻尼器線上控制轉子突加不平衡振動回響的方法,在對實際轉子系統參數未知或掌握不準確的情況下,僅根據所測轉子的特速和振動信號,利用連續增益調度(GSPI)控制方法,對轉子系統突加不平衡回響實施線上控制。
在航空航天工程領域中,對於大柔性結構(如空間站、大型天線、太陽能電池板、光學系統等)的振動控制己受到廣泛重視,己成為振動主動控制最活躍的領域。研究的中心問題是提高結構的模態阻尼與減少外擾的影響。新型智慧型材料及主動結構的出現,為大柔性結構的振動主動控制開闢了新的途徑。
在土木工程領域,對於高層建築及大跨度橋樑等,為保證結構完整性與其他要求(如建築中人的舒適性等),都要對隨機性外載(如風、地震等)引起的回響進行控制。近年來研製的主動式有阻尼動力吸振器取得了很好的減振效果。由於巨型土木工程振動控制系統大都屬於時滯的非定常線性系統,需用實時辨識技術進行線上建模,因此土木工程結構振動自適應控制技術尚需深入研究和探討。
機械工程領域,對於精密、超精密工具機以及精密測量儀器和電子加工設備等,由於對振動的要求極為嚴格,單純的被動隔振己不能滿足要求,必須採用主動振動控制技術。隨著機器人及各種操作手向高速、精密、重載、輕量化方向發展,柔性機械臂的振動控制日益受到重視,己成為機器人學研究領域的另一熱點。
在交通運輸工程領域內,為改善乘坐品質,需要對車輛進行主動隔振、半主動隔振。車輛懸架振動控制系統的研究和開發是車輛動力學與控制領域的國際性前沿課題。
在船舶海洋平台領域,為改善在波浪、風載荷激勵下容易產生的有害的振動,主動控制可以在全頻域範圍內有效地抑制海洋平台的振動。由於傳統的主動控制是基於精確數學模型的控制,對海洋平台這種具有非線性、強禍合、多變數和不確定性的時變複雜系統,以及控制過程中存在信號傳輸延時等原因,使得控制效果並不理想,因此,不依賴計算模型的神經網路、支持向量機等智慧型控制方法具有很強的穩定性、魯棒性和處理非線性的能力,可以有效地解決傳統控制方法難以解決的振動控制問題。
現有的振動主動控制技術的發展雖然取得了一些成果,但是還有一些理論和技術問題需要進一步的研究和探索。
(1)研究智慧型主動控制算法,如連續分布系統的控制方法、存在非線性特性和結構的時變不確定性系統的控制方法。隨著系統越來越複雜,傳統控制算法受到很大限制,需要發展智慧型控制技術,如神經網路、模糊控制等,而智慧型控制技術在振動主動控制中亦尚有許多問題亟待解決。
(2)要實現更精確的控制,開發高精度、智慧型化感測器、作動器和集成化感測作動部件己成必然之勢,而壓電材料具有正逆壓電禍合效應,這使得其既可作為感知外部環境變化的感測器,又可作為對外部環境變化作出迅速反應調整結構自身適應能力的致動器,壓電材料是發展的趨勢。
(3)結構控制一體化最佳化技術,即將感測器、作動器、控制器等有機地與結構集成。主動改變結構自身剛度和阻尼分布,自適應實現振動控制的目標。智慧型結構設計應綜合結構設計,感測器、作動器設計及其配置、控制器設計等環節聯合進行。這種智慧型結構在航空、航天、建築等工程中有著廣泛的套用前景 。
