
產品介紹
步進電機的原始模型起源於1830年至1860年間世紀年代後期,隨著永磁材料和半導體技術的發展,步進電機很快的發展並成熟起來。20世紀60年代後期我國開始研究和製造步進電機。從那時到60年代末,主要是高校和科研院所為研究一些裝置而開發的少量產品。70年代初開始,生產和研究才有所突破。70年代中期至80年代中期進入發展階段,各種高性能產品不斷被開發出來。80年代中期以後,由於對混合式步進電機的開發和研製,我國混合式步進電機的技術,包括本體技術和驅動技術在內,都逐漸接近國外產業的水平,各種混合式步進電機及其驅動器的產品套用逐漸多起來。
步進電機作為執行元件,是機電一體化的關鍵產品之一,廣泛套用在各種自動化設備中。步進電機是將電脈衝信號轉變為角位移或線位移的開環控制元件。當步進驅動器接收到一個脈衝信號,它就驅動步進電機按設定的方向轉動一個固定的角度(即步進角)。可以通過控制脈衝個數來控制角位移量,從而達到準確定位的目的。混合式步進電機是綜合了永磁式和反應式的優點而設計的步進電機。它又分為兩相、三相和五相,兩相步進角一般為1.8度,三相步進角 一 般為 1.2度 ,而五相步進角 一 般為0.72度。
工作原理
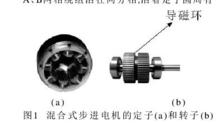
混合式步進電機的結構與反應式步進電機不同,反應式步進電機的定子與轉子均為一體結構,而混合式電機的定子與轉子都被分為下圖所示的兩段,極面上同樣都分布有小齒。
 混合式步進電機
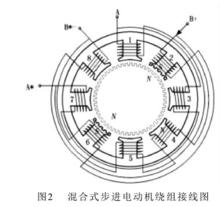
混合式步進電機定子的兩段齒槽不錯位,上面布置有繞組。上所示為兩相4對極電機,其中的l、3、5、7為A相繞組磁極,2、4、6、8為B相繞組磁極。每相的相鄰磁極繞組繞向相反,以產生上圖中x、y向視圖中所示的閉合磁路。
B相與A相的情況類似。轉子的兩段齒槽相互錯開半個齒距(見圖5.1.5),中間用環形永久磁鋼連線,兩段轉子的齒的磁極相反。根據反應式電機同樣的原理,電機只要按照A—B—A—B—A或A—B—A—B—A的順序通電,步進電機就能逆時針或順時針連續旋轉。
顯然,同一段轉子片上的所有齒都具有相同極性,而兩塊不同段的轉子片的極性相反。混合式步進電機與反應式步進電機的最大區別在於當磁化的永久磁性材料退磁後,則會有振盪點和失步區。
混合式步進電機的轉子本身具有磁性,因此在同樣的定子電流下產生的轉矩要大於反應式步進電機,且其步距角通常也較小,因此,經濟型數控工具機一般需要用混合式步進電機驅動。但混合轉子的結構較複雜、轉子慣量大,其快速性要低於反應式步進電機。
結構和驅動
國內生產步進電機的廠 家很多,其工作原理是是一樣的,下面以國產某兩相混合式步進電機42B Y G2 50C 及其驅動器SH20403為例介紹混合式步進電機的結構和驅動方法。
兩相混合步進電機結構
工業控制中採用如圖1所示的定子磁極上帶有小齒,轉子齒數很多的結構,其步距角可以做得很小。如圖1兩
 混合式步進電機
混合式步進電機相混合式步進電動機的結構圖,和圖2步進電機繞組接線圖,A、B兩相繞組沿徑向分相,沿著定子圓周有8個凸出的磁極,1、3、5、7磁極屬於A相繞組,2、4、6、8磁極屬於B相繞組,定子每個極面上有5個齒,極身上有控制繞組。轉子由環形磁鋼和兩段鐵芯組成,環形磁鋼在轉子中部,軸向充磁,兩段鐵芯分別裝在磁鋼的兩端,使得轉子軸向分為兩個磁極。轉子鐵芯上均勻分布50個齒,兩段鐵芯上的小齒相互錯開半個齒距,定轉子的齒距和齒寬相同。
 混合式步進電機
混合式步進電機兩相混合式步進電機的工作過程
 混合式步進電機
混合式步進電機當兩相控制繞組按
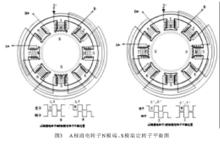
的次序 輪流通電,每拍只有一相繞組通電,四拍構成一個循環。當控制繞組有電流通過時便產生磁動勢,它與永久磁鋼產生的磁動勢相互作用,產生電磁轉矩,使轉子產生步進運動。當A相繞組通電時,在轉子N極端磁極1上的繞組產生的S磁極吸引轉子N極,使得磁極1下是齒對齒,磁力線由轉子N極指向磁極1的齒面,磁極5下也是齒對齒,磁極3和7是齒對槽,如圖 4所示A相通電轉子 N極端定轉子平衡圖。由於兩段轉子鐵芯上的小齒相互錯開半個齒距,在轉子S極端, 磁極1’和5’產生的S極磁場,排斥轉子S極,與轉子正好是齒對槽,磁極3’和7’齒面產生N極磁場,吸引轉子 S極,使得齒對齒。A相繞組通電時轉子N極端、S極端轉子平衡圖如圖3。
 混合式步進電機
混合式步進電機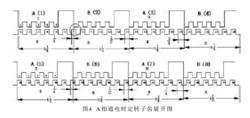 混合式步進電機
混合式步進電機因轉子上共有50個齒,其齒距角為360° /50=7.2°,定子每個極距所占的齒數為不是整數,因此當定子的A相通電,在轉子N極,磁極1的5個齒與轉子齒對齒,旁邊的B相繞組的磁極2的5個齒和轉子齒有1/4齒距的錯位,即 1.8°,如圖4所示 A相通電時定轉子齒展開圖畫圓圈的地方,A相磁極3的齒和轉子就會錯位 3.6°,實現齒對槽了。磁力線是沿轉子N端→A(1)S磁極→導磁環→A(3’)N磁極→轉子S端→轉子N端,成一閉合曲線 。當A相斷電B相通電時,磁極2產生N極性,吸合離它最近的S極轉子7齒,使得轉子沿順時針方向轉過1.8°,實現磁極2和轉子齒對齒,B相繞組通電定轉子齒展開圖如圖5所示,此時磁極3和轉子齒有1/4齒距的錯位。
依次類推若繼續按四拍的順序通電,轉子就按順時針方向一步一步地轉動,每通電一次即每來一個脈衝轉子轉過1.8°,即稱步距角為1.8°,轉子轉過一圈需要360°/1.8°=200個脈衝(見圖4、5)。
 混合式步進電機
混合式步進電機在轉子S極端也是同樣道理,當繞組齒對齒時,其旁邊一相磁極錯位1.8°。3 步進電機驅動器步進電機必須有驅動器和控制器才能正常工作。驅動器的作用是對控制脈衝進行環形分配、功率放大,使步進電機繞組按一定順序通電,控制電機轉動。步進電機 42BYG250C的驅動器為SH20403。為10V~40V直流供電, A+、A-、B+、B-端 子要連線步進電機的四條引線,DC+、DC-端子接驅動器工作直流電源,輸入接口電路包括公共端(接輸入端子電源正極)、脈衝信號輸入端(輸入一系列脈衝,內部分配以驅動步進電機A、B相)、方向信號輸入端(可實現步進電機的正、反轉)、脫機信號輸入端。
優點
混合式步進電機分為兩相、三相和五相:兩相步進角一般為1.8度而五相步進角一般為 0.72度,混合式步進電機隨著相數(通電繞組數)的增加,步進角減小,精度提高,這種步進電機的套用最為廣泛。混合式步進電機綜合了反應式和永磁式步進電機兩者的優點:極對數等於轉子齒數,可以根據需要在很大範圍內變化;繞組電感隨
轉子位置變化較小,易於實現最佳運行控制;軸向充磁磁路,使用高磁能積的新型永磁材料,有利於電機性能的提高;轉子磁鋼提供勵磁;在整個運行區域沒有明顯的振盪。
