
簡介
電液伺服系統通過使用電液伺服閥,將小功率的電信號轉
 液壓伺服系統
液壓伺服系統換為大功率的液壓動力,從而實現了一些重型機械設備的伺服控制。
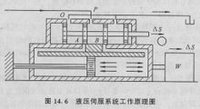
圖所示為一個對管道流量進行連續控制的電液伺服系統。在大口徑流體管道1中,閥板2的轉角θ變化會產生節流作用而起到調節流量qT的作用。閥板轉動由液壓缸帶動齒輪、齒條來實現。這個系統的輸入量是電位器5的給定值xi。對應給定值xi,有一定的電壓輸給放大器7,放大器將電壓信號轉換為電流信號加到伺服閥的電磁線圈上,使閥芯相應地產生一定的開口量xv。閥開口xv使液壓油進入液壓缸上腔,推動液壓缸向下移動。液壓缸下腔的油液則經伺服閥流回油箱。液壓缸的向下移動,使齒輪、齒條帶動閥板產生偏轉。同時,液壓缸活塞桿也帶動電位器6的觸點下移xp。當xp所對應的電壓與xi所對應的電壓相等時,兩電壓之差為零。這時,放大器的輸出電流亦為零,伺服閥關閉,液壓缸帶動的閥板停在相應的qT位置。
控制系統
 液壓伺服系統
液壓伺服系統液壓傳動中具有隨動作用的液壓自動控制系統。在這種系統中,大功率的液壓元件(包括液壓伺服閥和液壓執行元件) 跟隨小功率的指令信號元件動作。執行元件所控制的通常是位置、速度等機械量。指令信號元件又稱參考信號元件,它發出代表位置、速度或其他量的指令信號。大功率與小功率之比可以達幾百萬倍以上。液壓伺服系統是反饋控制系統,反饋回來代表實際狀態的信號與指令信號比較,得到誤差信號,如果誤差不是零,便進行調節。例如在高射炮自動瞄準系統中,雷達跟蹤飛機,並將信號送給指揮儀,指揮儀計算出高射炮管應處的位置,炮管的實際位置與指揮儀算出的指令位置在系統中不斷進行比較和調節,直到誤差小於許可值時才射擊。液壓伺服系統通常應包括:實際狀態的測量反饋元件;小功率指令信號的傳遞元件和大功率液壓執行元件;期望狀態和反饋狀態的比較元件;差值信號的放大元件。液壓伺服系統分為機械液壓伺服系統、電液伺服系統和氣液伺服系統。它們的指令信號分別為機械信號、電信號和氣壓信號。電液伺服系統因電氣控制靈活而得到廣泛的套用;氣液伺服系統用於防爆的環境或容易獲得氣壓信號的場合。液壓伺服系統應具有必要的性能:工作穩定;對指令信號反應快;穩態誤差小;對干擾不敏感。液壓伺服系統是自動控制系統中套用最廣泛的一種。在精密加工的定位系統中,液壓伺服系統能保證小於0.1微米的加工誤差。世界上許多巨大天文望遠鏡的動作,都是用星光作為伺服系統的指令信號,通過液壓伺服系統和執行元件進行跟蹤的。
系統組成
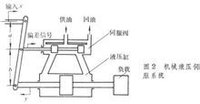
液壓伺服系統液壓伺服系統是由液壓動力機構和反饋機構組成的閉環控制系統﹐分為機械液壓伺服系統和電氣液壓伺服系統(簡稱電液伺服系統)兩類。其中﹐機械液壓伺服系統套用較早﹐主要用於飛機的舵面控制和工具機仿型裝置上。隨著電液伺服閥的出現﹐電液伺服系統在自動化領域占有重要位置。很多大功率快速回響的位置控制和力控制都套用電液伺服系統﹐如飛機﹑飛彈的舵機控制系統﹐船舶的舵機系統﹐雷達﹑大炮的隨動系統﹐軋鋼機械的液壓壓下系統﹐機械手控制和各種科學試驗裝置(飛行模擬轉台﹑振動試驗台)等。
優缺點
液壓伺服系統是從1950年開始出現的,幾十年來獲得了很大的發展,目前在各種技術領域裡幾乎都廣泛的使用了液壓控制 。
優點
(1)液壓執行機構的動作快,換向迅速。就流量——速度的傳遞函式而言,基本上是一個固有頻率很大的振盪環節,而且隨著流量的加大和參數的最佳匹配可以使固有頻率增大到和電液伺服閥的固有頻率相比。電液伺服閥的固有頻率一般在100HZ以上,因而液壓執行機構的頻率回響是很快的,而且易於高速啟動、制動和換向。與機電系統執行機構相比,固有頻率通常較高。
(2)液壓執行機構的體積和重量遠小於相同功率的機電執行機構的體積和重量。因為隨著功率的增加液壓執行機構(如閥、液壓缸或馬達)的體積和重量的增加遠比機電執行機構增加的慢,這是因為前者主要靠增大液體流量和壓力來增加功率,雖然動力機構的體積和重量也會因此增加一些,但卻可以採用高強度和輕金屬材料來減少體積和重量。
(3)液壓執行機構傳動平穩、抗干擾能力強,特別是低速性能好,而機電系統的傳遞平穩性較差,而且易受到電磁波等各種外干擾的影響。
(4)液壓執行機構的調速範圍廣,功率增益高。
缺點
(1)液壓信號傳遞速度慢不易進行校正,而電信號則是按光速來傳遞信息,而且易於綜合和校正。但是電液伺服系統由於在功率級以前採用了電信號,因而不存在這一缺點,而且在某種意義講這種系統具備了電、液兩類伺服的優點。
(2)液壓伺服系統的結構複雜、加工精度高,因而成本高。
(3)液體的體積彈性模數隨溫度和混入油中的空氣含量而變。當溫度變化時對系統性能有顯著影響。與此相反,溫度對氣體的體積彈性模數影響很小,因此對氣動控制系統的工作性能影響不大。溫度對液體的粘度影響很大,低溫時摩擦損失增大;高溫時泄漏增加,並容易產生氣穴現象。
(4)漏油是液壓系統的弱點,它不僅污染環境,而且容易引發火災。液壓油易受污染,並可造成執行機構堵塞。
