
工作原理
 圖1、DHM的工作原理
圖1、DHM的工作原理數字全息顯微鏡DHM的工作原理如圖1所示,通過干涉產生的全息圖被CCD感測器採集,經過電腦特定算法計算,重建微觀物體的三維圖像 。全息圖(Hologram)是由若干干涉條紋構成的,而要產生干涉條紋需要使用單色相干光源,比如說雷射。
通過雷射器發出的雷射主要有兩種典型的光路布局,反射式和透射式。
反射式光路
 圖2、反射式DHM
圖2、反射式DHM反射式光路 如圖2所示,從雷射器發出的雷射被分為兩束光,一束通過多個反射鏡直接投射到分光鏡,稱為參考光R;另外一束則照射物體表面,經物體反射後攜帶表面形貌的波前(相位和振幅)信息,並通過顯微物鏡返回分光鏡,稱為物光O。參考光R和物光O在經過分光鏡時產生干涉條紋形成全息圖,並由CCD感測器記錄。
透射式光路
 圖3、透射式DHM
圖3、透射式DHM透射式光路如圖3所示,與反射式相同的是雷射開始都被分為兩束,參考光R和物光O。與反射式不同的地方是,物光O是穿透物體之後再與參考光R形成干涉條紋。因此投射式光路要求物體對此波長的雷射來說是透明的。
獨特優勢
數字全息顯微鏡相比其他顯微術,比如雷射共聚焦顯微鏡(Laser confocal microscopy)、白光干涉儀(White light interferometry,WLI)和雷射都卜勒測振儀(Laser doppler vibrometer, LDV),有以下一些獨特的優勢:
數字自動聚焦
 圖4、DHM數字自動聚焦原理
圖4、DHM數字自動聚焦原理傳統的自動聚焦都是通過機械方式調節焦距來尋找希望聚焦的像面。不同的是,在全息成像中,單張全息圖即包含了全部像面的信息,可以理解為是多層像面的疊加,這樣就允許通過數值算法在計算機上自動選取需要聚焦的像面,因此稱之為數字自動聚焦 ,如圖4所示。這項功能使得數字全息顯微鏡抓取圖像速度極快,因為省去了機械掃描尋找聚焦像面的過程。記錄下來的全息圖也允許用戶在後期處理時重新尋找聚焦像面,有報導稱這種方法能提高解析度和圖像質量 。
雷射度量衡
光的波長是一種極其精確穩定的參照長度,早在1960年,國際單位制就已經使用氪86(氪的一种放射性同位素)的放射線波長作為長度度量衡的標準 。數字全息顯微鏡利用干涉濾波產生的極其穩定的單色雷射,以此波長作為度量衡測量微觀結構,測量精度可以達到皮米級 。
非掃描式顯微
數字全息顯微鏡能夠實現三維形貌的實時呈現,得益於它非掃描機制 。抓取單張全息圖的時間是由相機的快門速度決定的,因此數字全息顯微鏡能夠輕鬆實現普通視頻速率,比如30幀/秒。而利用超高速相機,甚至能達到1000幀/秒的抓取速率 。
相移顯微
有別於相差顯微鏡, 數字全息顯微鏡是基於獨特的相移顯微原理 。光波在經過物體表面反射或者透過物體之後,受物體表面形貌或者是物體內部不同物質折射率的影響而產生相移,這樣就攜帶上了物體的三維特徵。
無須細胞標記
透明樣品,比如說細胞,利用傳統的相襯顯微鏡只能進行觀測。透射式的數字全息顯微鏡記錄光在經過細胞之後的相移信息,不僅能觀測細胞,還能進行三維重建和量化分析,因此也被稱為量化相襯顯微法 。細胞中的相移是由細胞內不同組織細微折射率的變化引起的,因此數字全息顯微鏡觀測細胞無須對細胞進行任何標記,比如螢光染色,納米顆粒或是輻射,這樣不會對被觀測細胞造成任何損傷或是外在影響 。
獨特光路設計
和其他干涉技術一樣,數字全息顯微鏡產生干涉的前提是兩束光的光程差要小於相干長度。由於觀測不同大小物體需要使用不同放大倍數的物鏡,因此物光O的光程會因此改變。數字全息顯微鏡能根據不同物鏡自動調節參考光R的光程,使得兩束光的光程差總是符合產生干涉的條件,這種設計也使得各物鏡下達到共焦的效果 。
套用案例
經過20世紀初的十多年發展,數字全息顯微鏡已經在各領域內擁有眾多成功案例,這些領域歸結起來主要涵蓋了無標記生物細胞檢測 、材料表面度量 、微系統與微機電系統多維振動分析 、動態形貌測量 、微光學元件檢測 等。
無標記生物細胞觀測
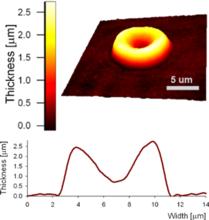 圖5、DHM測量單個血紅細胞三維形貌
圖5、DHM測量單個血紅細胞三維形貌得益於數字全息顯微鏡對生物細胞非侵入式的視覺化量化分析能力,多種在生物醫藥領域的套用已經得到廣泛的關注。例如圖5所示,數字全息顯微鏡可以測量單個血紅細胞的三維形貌,由於無需掃描,測量過程是實時的,因此也可以對多細胞進行動態跟蹤分析 。圖6則展示了數字全息顯微鏡對酵母菌的動態跟蹤,可以三維實時觀測酵母菌的移動和細胞分裂 。
 圖6、DHM對酵母菌動態跟蹤
圖6、DHM對酵母菌動態跟蹤材料表面度量
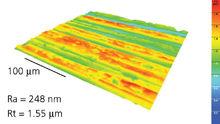 圖7、DHM測量表面粗糙度
圖7、DHM測量表面粗糙度數字全息顯微鏡能夠根據國際標準化組織ISO制定的表面粗糙度標準進行有效測量,如圖7所示。根據ISO定義的表面粗糙度,只有大於定義長度或範圍內的粗糙度測量才符合標準。數字全息顯微鏡能夠通過高倍物鏡捕捉有限視場內的粗糙度,並結合圖像拼接達到定義長度或範圍的方式,達到ISO表面粗糙度測量的標準。
微系統與微機電系統MEMS多維振動分析
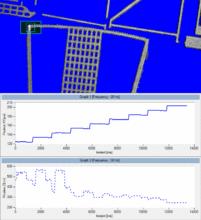 圖8、DHM同時檢測MEMS器件面內和離面運動
圖8、DHM同時檢測MEMS器件面內和離面運動數字全息顯微鏡在記錄全息圖時也記錄下了圖上每個像素點的三維信息,因此能夠實現對每個像素點的三維同步實時跟蹤,在測量微系統與微機電系統MEMS的多維振動套用上體現了獨一無二的優勢。對於離面(Out-of-plane)運動的測量達到了MEMS雷射測振儀(也被稱為MEMS分析儀)的精度,而對於面內(In-plane)運動的測量精度則遠遠超過其他各種MEMS分析儀的測量精度,達到了1納米 。如圖8所示,數字全息顯微鏡實現了對MEMS器件面內和離面運動同步實時跟蹤。數字全息顯微鏡在頻閃模式下還能記錄在高頻諧振下MEMS的不同模態,如圖9所展示的MEMS懸臂樑不同頻率下的諧振模態。
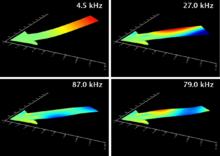 圖9、DHM測量MEMS懸臂樑不同諧振模態
圖9、DHM測量MEMS懸臂樑不同諧振模態動態形貌測量
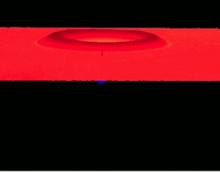 圖10、DHM動態三維測量表面凹孔
圖10、DHM動態三維測量表面凹孔數字全息顯微鏡可以實現亞納米精度下的動態三維形貌測量,實時速率取決於相機捕獲圖像速率,最高可以達到1000幀/秒。數字全息顯微鏡的縱向相干長度大,因此無需縱向掃描,即能實現三維成像,這是數字全息顯微鏡對比於其他三維顯微技術最獨特的優勢 。如圖10所示,數字全息顯微鏡實時測量樣品表面凹孔。
微光學元件檢測(表面形貌測量,折射率)
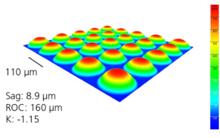 圖11、DHM測量微透鏡陣列
圖11、DHM測量微透鏡陣列數字全息顯微鏡在表征微光學元件的套用方面也具有獨特優勢,特別是透射式DHM,由於使用投射折射原理,相比於使用反射原理的反射式DHM,對於微光學元件的可測量邊界角度大大增加。圖11展示了數字全息顯微鏡測量微透鏡陣列 。
技術比較
數字全息顯微鏡 (DHM) 採用非掃描 (non-scanning) 技術,全視場瞬態成像四維量測,單幀全息圖包含三維形貌信息,縱向亞納米測量精度由雷射本徵波長決定,使用普通顯微物鏡便於維護保養。白光干涉儀(White light interferometer)採用垂直掃描(vertical scanning)技術,利用干涉條紋對被測樣品進行機械垂直掃描來獲得靜態三維形貌信息,使用特殊干涉物鏡並無法顯示動態四維形貌。共聚焦顯微鏡(Confocal Microscope)同樣採用掃描技術測量靜態三維形貌,單張測量時間較長因此也無法實現四維形貌測試。雷射都卜勒測振儀(Laser doppler vibrometer)則採用單點測量,需橫向掃描得到樣品多點振動信息,受雷射斑點大小影響,對於微小面內振動(in plane)的測量精度有限。
發展歷史
全息技術最早是由Denis Gabor於1947年發明的,當時他提出了創新的全息技術用於改進電子顯微鏡 ,他本人因這項發明於1971年獲得了諾貝爾物理學獎 。
上世紀60年代末到70年代初,陸續出現了關於數字全息概念的報導,即利用數字成像取代傳統膠片曝光的方式來記錄全息圖,之後再通過數值重建來還原物體圖像 。然而,當時的數字成像水平和計算機數值處理能力遠遠不能滿足數字全息的實用化,因此在經歷了最初幾年的研究熱潮之後,數字全息技術陷入了沉寂。不過,對數字全息技術的研究並沒有中斷,而是逐漸細分為兩個不同的方向:一是由全息圖數值重建物體圖像,二是由物體三維模型數值計算出全息圖。這兩個方向並行發展到今天,即是我們所說的數字全息顯微(DHM)和計算機生成全息圖(Computer-generated Holography,檢測CGH)。
到了上世紀90年代中期,數字成像感測器和計算機處理能力有了大幅度的發展和提高,但當時的成像感測器主要是兼容各種彩電制式(PAL、NTSC或者SECAM)的低像素感測器,只能夠勉強滿足數字全息顯微的要求,離實用化相距甚遠 。最早關於數字全息顯微套用的報導來自瑞士洛桑聯邦理工學院(EPFL)的Etienne Cuche(現為瑞士Lyncée tec公司CTO) 。
給數字全息顯微技術帶來革命性發展的是20世紀初數位照相機的普及,市場被需求所驅動不斷推出各種低成本高像素的CCD或者CMOS圖像感測器。與此同時,在全息技術中關鍵的雷射器也受益於半導體產業的發展,出現了各種超小型高性能的雷射二極體,為數字全息技術的普及和實用化提供了必要條件。在這之後,誕生了最早幾家提供數字全息顯微技術的商業公司,4Deep inwater imaging, Phase Holographic Imaging, 和Lyncée tec。其中瑞士Lyncée tec是市場上最早也是唯一同時提供透射式和反射式專業全息顯微鏡的公司,DHM®為其公司註冊商標。
