
簡要介紹
在圖像測量過程以及機器視覺套用中,常常會涉及到這樣一個概念,那就是利用攝像機所拍攝到的圖像來還原空間中的物體。在這裡,不妨假設攝像機所拍攝到的圖像與三維空間中的物體之間存在以下一種簡單的線性關係:
[像]=M[物]
相關說明
MV-SB型
● 特徵圓成陣列分布,間距30mm、板子尺寸:300X300mm。
● 4個大圓為標誌圓,大圓環標誌確定方向。
● 用特徵圓的圓心坐標進行標定。
● 特徵圓的圓心坐標提取方法:獲得4個標誌圓坐標,利用仿射變換將特徵圓的坐標調正,然後對其進行排序,確定相應特徵圓圖像坐標。
● 採用鋁合金材料。
標定方法
算法原理
 攝像機標定
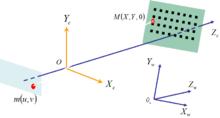
攝像機標定在這裡假定模板平面在世界坐標系Z=0的平面上。
基本原理:
 攝像機標定
攝像機標定其中,K為攝像機的內參數矩陣,[X Y 1] 為模板平面上點的齊次坐標,[u v 1] 為模板平面上點投影到圖象平面上對應點的齊次坐標,[r r r]和t 分別是攝像機坐標系相對於世界坐標系的旋轉矩陣和平移向量。
 攝像機標定
攝像機標定根據旋轉矩陣的性質,即r r=0和||r||=||r||=1,每幅圖象可以獲得以下兩個對內參數矩陣的基本約束
 攝像機標定
攝像機標定 攝像機標定
攝像機標定由於攝像機有4個未知內參數,所以當所攝取得的圖像數目大於等於3時,就可以線性唯一求解出K。
算法描述
1、列印一張模板並貼在一個平面上;
2、從不同角度拍攝若干張模板圖像;
3、檢測出圖像中的特徵點;
4、求出攝像機的內參數和外參數;
5、求出畸變係數;
6、最佳化求精。
優缺點
張正友的平面標定方法是介於傳統標定方法和自標定方法之間的一種方法。它既避免了傳統方法設備要求高,操作繁瑣等缺點,又較自標定方法精度高,符合辦公、家庭使用的桌面視覺系統(DVS)的標定要求。此方法是需要確定模板上點陣的物理坐標以及圖像和模板之間的點的匹配,這給不熟悉計算機視覺的使用者帶來了不便 。
攝像機標定方法分類
| 標定方法 | 特點 | 優點 | 不足 |
| 傳統攝像機標定方法 | 利用已知的景物結構信息 常用到標定塊。 | 可以使用於任意的攝像機模型,標定精度高 | 標定過程複雜,需要高精度的已知結構信息 |
| 主動視覺攝像機標定方法 | 已知攝像機的某些運動信息 | 通常可以線性求解,魯棒性比較高 | 不能使用於攝像機運動未知和無法控制的場合 |
| 攝像機自標定方法 | 僅依靠多幅圖像之間的對應關係進行標定 | 僅需要建立圖像之間的對應,靈活性強 | 非線性標定,魯棒性不高 |
