攝影常識——7
感光元器件
膠片相機記錄感覺信息的載體是膠片(膠捲)。數位相機則通過成像感光元器件將感覺信息轉換成表示信息(二進制編碼的“0、1”),而記錄到CF等接口的存儲卡載體上。
成像感光元器件與數位相機一體的,是數位相機的心臟。感光器是數位相機的核心,也是最為關鍵的技術。數位相機的發展,實質上就是感光器的發展。目前,數位相機的核心成像感光器件,有兩種:①電荷藕合器件圖像感測器(ChargeCoupledDevice簡寫為CCD)。②互補金屬氧化物導體(ComplementaryMetal-OxideSemiconductor簡寫為CMOS)。
一、電荷藕合
電荷藕合(CCD)使用一種高感光度的半導體材料製成,能把光線轉變成電荷,通過模數轉換器晶片轉換成數字信息,數字信息經過壓縮以後,由數位照相機內部的閃速存儲器(如:CF卡)或內置硬碟卡保存。可以把圖像數字信息,傳輸給計算機。並可以藉助於計算機的處理手段,根據需求來修改圖像數字信息。
人眼視網膜是由分工合作組成的兩種視覺感應細胞組成的:①負責光強度感應的柱形細胞。②負責色彩感應的錐形細胞。
電荷藕合(CCD)和膠片(膠捲)相比,感覺光線的工作方式,更接近於人眼視網膜等視覺神經系統。主要組成是由一個類似“馬賽克”的格線、聚光鏡片以及墊於最底下的電子線路矩陣所組成。
目前,電荷藕合(CCD)光敏元件主要有兩種類型:①線性CCD。②矩陣性CCD。
⒈線性CCD
線性CCD用於高解析度的靜態相機。每次只拍攝圖像的一條線,這與平板掃瞄器,掃描照片的方法相同。
特點:
CCD精度高,速度慢,無法用來拍攝移動的物體,也無法使用閃光燈。
⒉矩陣式CCD
矩陣式CCD每一個光敏元件,代表著圖像中的一個像素。當快門打開時,整個圖像同時一次曝光。
矩陣式CCD處理色彩的方法——是將彩色濾鏡嵌在CCD矩陣中,相近的像素使用不同顏色的濾鏡。
在記錄相片的過程中,相機內部的微處理器從每個像素獲得信號,將相鄰的4個點合成為一個像素點。
特點:
允許瞬間曝光,微處理器能運算地非常快。
因為不是同點合成,其中包含著數學計算,所產生的圖像,無法達到很銳利的程度。
例如:典型的兩種CCD排列方式。
①原色CCD方式:綠—紅—綠—藍(G-R-G-B)。以光的三種原色紅綠藍(RGB)為感光基礎。
優點:色彩調和準確、還原度高、真實自然、畫質銳利,對於後期數字圖像處理調色容易。
缺點:不能根除噪聲問題,黑白兩色容易形成雜點、色階較窄。
因此,一般採用原色CCD的數位相機在ISO感光度上多半不會超過400。
②補色CCD方式:青—黃—品紅—綠(C-Y-M-G)。以青黃品紅綠(CYMG)為感光基礎。
優點:色階較寬、色彩混合變化多而精細豐富。
缺點:色彩過於細緻使圖像表現較柔和而不夠鮮明,還犧牲了部分圖像的解析度,並且對於後期數字圖像處理時調色不易,容易產生色散或偏色的問題。
在ISO值上,補色CCD方式可以獲得較高的感光度,一般都可以在ISO800以上。
這兩種排列方式成像的原理都是一樣的。但是,不同方式對數位相機的成像質量有重要影響。
⒊CCD成像的原理
光的三原色為:紅(Red)、綠(Green)、藍(Blue)。在計算機中,則用一個8位二進制的數(11111111)2來表示某一種顏色的灰度值。用十六進制的(FF0000)16來表示一個單純的紅色。用十六進制的(00FF00)16來表示一個單純的綠色。用十六進制的(0000FF)16來表示一個單純的藍色,這種方法可以表示224=16777216種顏色。
顏色的取值範圍是:(000000)16~(FFFFFF)16,任何一種顏色,是由光的三個原色不同的灰度值來表示的,如:(ⅩⅩⅩⅩⅩⅩ)16。
例如:黑色(000000)16、白色(FFFFFF)16、灰色(666666)16、某種顏色(123456)16。
不同進制數值的轉換,如:(11111111)2=(FF)16=(255)10
一個像素不可能感知所有色彩的灰度,只能感知紅(Red)、綠(Green)、藍(Blue)當中的某一種色彩的灰度。
為了顯示彩色圖像,可以讓三種像素點分別專門感知紅色、綠色、藍色三種灰度。這樣,光三原色的單個顏色的採樣灰度色階就有了。
一個像素可以理解為一個採樣精度為255階的模數(AD)轉換口。如:負責採樣紅色灰度值的像素,得到當前光線中紅顏色的灰度數字信息。同理,得到綠色、藍色的灰度數字信息。
電荷藕合(CCD)上,三種採樣不同顏色灰度數字信息的像素點交叉布局的結構,如圖1所示。
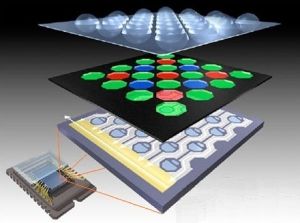 圖1 三種感知顏色的像素分布
圖1 三種感知顏色的像素分布從圖中可以看到:紅綠藍三種顏色的像素點的分布數量比是1:2:1。
紅色和藍色點是一個隔一個。而綠色點則占了一整行。也就是說紅綠藍(RGB)三種顏色像素點的數量之比為1:2:1。
由於人的視覺器官,對綠色特別敏感。所以,刻意多加了綠色灰度數據信息的收集,這樣做的目的是為後期處理相片的做鋪墊。
當拍完相片圖像之後,得到的就是這些小型數模(AD)採樣灰度值,也就是相機原始圖像編碼的表示媒體信息——數位相機的“底片”。輸出的檔案叫做RAW格式檔案。存的就是這三種顏色的灰度數字信息。
例如:一台1200萬個像素的照相機。
CCD上有1200萬個感光像素點。紅綠藍(RGB)三種顏色像素點的數量之比為1:2:1。最終生成的RAW格式檔案中,包含300萬個紅(R)顏色的灰度值,600萬個綠(G)顏色的灰度值,300萬個藍(B)顏色的灰度值。
⒈計算沒有壓縮時的成像檔案的大小:
①如果1個感光像素點占用8個二進制位。那么,1200萬個感光像素點占用的二進制位數為:8位(bit)×12000000=96000000位(bit)
②1200萬個感光像素點占用位元組數為:96000000位(bit)÷8=12000000位元組(Byte)
③單位換算:
12000000位元組(Byte)÷1024=11718.75位元組(Byte)=11.71875兆位元組(MB)≈12兆位元組(MB)
答:這一台1200萬個像素的照相機,最後生成一個未壓縮的RAW格式檔案大小約為12MB。
⒉將1200萬個像素的RAW格式檔案,轉換成紅綠藍(RGB)像素的TIFF格式檔案,有多大?
①一個紅綠藍(RGB)三種顏色像素點,用一個3×8位(bit)=24位(bit)表示,那么TIFF格式檔案的大小應為:
11.71875兆位元組(MB)×3=35156.25兆位元組(MB)≈36兆位元組(MB)
②分析:那么,多出來的2倍的數據是哪裡來的?是因為一個像素是由一個8位的二進制數來表示,而最終看到的圖像是一個紅綠藍(RGB)像素,則是由一個8位×3=24位的二進制數值來表示的。
這是數位照相機、或者計算機的中央處理單元(CPU),採用所謂“插值算法”算出來的。
(插值算法簡述:通過這個像素周邊的顏色灰度值來計算出這個像素點的紅綠藍(RGB)值。如果這個顏色像素點記錄的是紅(R)的灰度值,那么插值的時候,程式就會去找這個像素點周邊綠(R)和藍(B)像素點的灰度值,這樣可以補足24位。)
數位照相機成像出現紫邊產生的原因,可以總結為三點:
①照相機鏡頭的色差。②電荷藕合(CCD)成像的局限性。③相片放大倍數。
其中,插值算法應該是出現紫邊的主要原因。
二、互補性氧化金屬半導體
互補性氧化金屬半導體(ComplementaryMetal-OxideSemiconductor,簡寫為CMOS)和電荷藕合(CCD)一樣,同為在數位相機中可記錄光線變化的半導體。
CMOS主要是利用矽或鍺的半導體元素,使其在CMOS上存有PN結,由於互補效應所產生的電流,被處理晶片紀錄和解讀成影像。
缺點:太容易出現雜點。(早期的CMOS在處理快速變化的影像時,由於電流變化過於頻繁而產生過熱現象。)
三、超級電荷藕合
超級電荷藕合CCD(SuperCCD)則採用了一種八邊形的二極體,像素是類以蜂窩狀(六邊形)排列,並且單位像素的面積要比電荷藕合(CCD)大。
將像素鏇轉45度排列的結果,是可以縮小對圖像拍攝無用的多餘空間,光線集中的效率比較高,效率增加之後使感光性、信噪比和動態範圍都有所提高。
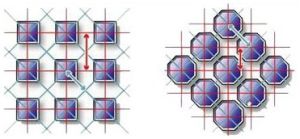 圖2 普通CCD(呈矩陣排列)、超級CCD(呈蜂窩狀排列)
圖2 普通CCD(呈矩陣排列)、超級CCD(呈蜂窩狀排列) 普通電荷藕合CCD中的每個像素,是有由一個PN結的感光二極體、控制信號路徑和電量傳輸路徑組成。
超級電荷藕合CCD採用蜂窩狀的八邊二極體,原有的控制信號路徑被取消了,只需要一個方向的電量傳輸路徑即可。使得感光二極體有更多的空間。
特點:排列結構緊密,像素利用率較高,感光度、信噪比和動態範圍都有所提高。
