系統介紹
計量泵是一種小型恆壓控制系統,在石油、化工、煤礦等領域具有重要的套用價值。當前設計的計量泵在恆壓工作環境下的控制精度低、穩定性較差、實用性較差。嵌入式技術可將計算機控制、通信、網路同計量泵相融合,可大大提高系統的控制精度。因此,將嵌入式技術引入精密計量泵,提出一種基於 ARM 處理器和嵌入式 Linux 作業系統的計量泵恆壓控制系統,可以提高小型恆壓控制系統的控制精度和穩定性 。
小型系統設計
總體設計
 恆壓控制系統
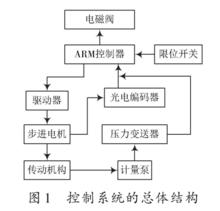
恆壓控制系統小型恆壓控制系統包括 ARM 控制器、壓力變送器、限位開關、光電編碼器、電磁閥以及驅動器,其總體結構如圖1所示。ARM 控制器的關鍵部分為嵌入式處理器 S3C2440,其採用擴展 A/D 變換器、SD卡、LCD 觸控螢幕等部件,同其他設備連線和管理;壓力變送器採集計量泵的出口壓力,將檢測到的壓力反饋到輸入端同設定值對比,並將形成的誤差採用模糊 PID 控制算法獲取對應的脈衝頻率,依據該脈衝頻率調整步進電機的運行速度,調控總體系統的壓力,確保系統壓力的均衡性。限位開關發生變化時,ARM 控制器同電機驅動器間的連線電路發生調整,驅動電機調整方向。光電編碼器與電機相連,將電機運行脈衝反饋到 ARM 控制器中進行分析 。
系統硬體設計
 恆壓控制系統
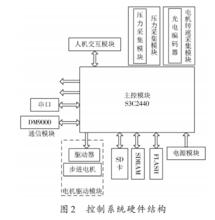
恆壓控制系統採用模組化思想設計系統的硬體模組,主要包括主控模組、存儲模組、數據採集模組、電機驅動模組、通信模組、電磁閥和限位開關模組,總體結構如圖2所示。
1.主控模組和存儲模組
設計系統的主控模組採用來自三星公司的嵌入式晶片S3C2440A,該晶片的核心為ARM920T,擁有低功耗、高處理運算性能。晶片使用 MMU,AMBA 匯流排體系結構以及哈佛結構,並集成了 SDRAM 控制器、FLASH 控制器、SPI 控制器等硬體外設。
系統為 S3C2440A 部署了由 2 片 HY57V561620 並聯構成的 64MB SDRAM,並且將採集到的壓力數據保存到 4GB 的SD卡中。嵌入式晶片 S3C2440 中集成了SD 控制器 ,系統採用SD匯流排模式驅動SD卡。S3C2440 處理器在 SD 模式中通過 5 根信號線同 SD 卡完成信息的交流,並且為各信號線配置 10kΩ的上拉電阻。
2.採集模組設計
(1)壓力變送器的選擇。系統通過來自於森納士公司的 ME 系列壓力變送器,採集計量泵的壓力值。變送器通過 A/D 轉換電路,實現壓力信號的模/數變換,將輸出的 4~20 mA 電流信號調整至 0.5~2.5 V 的區間中。
(2)光電編碼器的選擇與連線。系統採用光電編碼器獲取步進電機的轉速,將電機主軸的輸出位移量變換成 ARM 處理器能夠分析的脈衝數字量。設計的光電編碼器包括光柵盤以及光電探測部件。在小型恆壓控制系統中,光電碼盤同步進電機同軸連線並以相同的速度運動,採用發光二極體等電子器件構成的檢測部件獲取脈衝信號。對光電編碼器輸出的脈衝頻率進行分析,能夠獲取電機的轉速,完成電機轉速的有效檢測,同時採用 ARM 控制器對電機的脈衝數和脈衝頻率進行管理,完成電機轉速的準確管理,實現總體系統壓力的平穩控制。
3.通信模組設計
因為串口的通信協定簡便,在通信領域中具有較高的套用價值。因此,系統使用串口 RS 232完成目標板同PC機間的通信。S3C2440處理器中集成了 3個 UART控制器,並且將 UART0當成通信連線埠。S3C2440晶片通過TTL電平設定 5V,0V 描述邏輯正和邏輯負,而 PC 機的COM連線埠採用 RS 232電平設定 10V,-10V描述邏輯負和邏輯正。因此 S3C2440 晶片和PC機間應通過SP3232EEN 晶片進行電平變換,完成系統的通信。
4.電機驅動模組設計
(1)步進電機工作原理。系統採用 ARM 控制器產生脈衝信號管理步進電機,控制器傳遞出一個脈衝信號,則電機依據設定的方向變換相應的角度。步進電機的運動狀態同控制器產生的脈衝頻率和脈衝數具有較高的關聯性。因此,調整 ARM 控制器的脈衝頻率,可對電機的轉速進行調整,而調整控制器的脈衝數量,可對電機的變換角度進行調整。ARM 控制器對步進電機進行控制過程中應設計功率放大電路,但是該電路的開發成本較高。因此,為了提高步進電機的控制效率,系統在電機驅動模組中設計了具有細分控制技術的步進電機驅動器。步進電機驅動器包括脈衝分配電路、功率驅動電路、保護電路等器件,可對電機的電流、電壓和功率進行細化控制。當電機驅動器採集到 ARM 控制器的方向信號以及脈衝信號後,脈衝分配電路依據設定的通電手段形成電機相勵磁繞組的通斷信號,對電機進行調整。功率驅動電路將 ARM 控制器產生的低功率信號變換成可驅動電機運動的高功率信號。保護電路避免步進電機出現電壓和電流過高的問題,確保電機的順利運行。設計的控制系統採用二相混合式步進電機,以及 SD20806型兩相混合式步進電機驅動器。
(2)PWM 調速原理。系統實現恆壓控制,需要對步進電機的轉速進行調整。系統對 PWM 定時器的原始值進行控制,確保脈衝頻率發生變化,進而調整電機的轉速。系統的主控晶片S3C2440中存在5個定時器,其中的4 個定時器具有 PWM 調速功能 。
系統實現
主程式設計
 恆壓控制系統
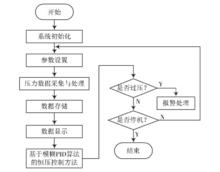
恆壓控制系統設計的控制系統軟體劃分成系統初始化模組、數據採集和處理模組、數據存儲模組、人機互動模組和控制管理模組。系統的主程式流程如圖所示。
系統初始化模組對系統硬體設備參數及性能初始化設定;數據採集和處理模組驅動感測器採集恆壓控制系統中泵的輸出壓力,同時對採集的壓力數據進行融合;數據存儲模組通過SD卡保存數據採集和處理模組獲取的數據,並塑造相應的資料庫;用戶通過人機互動模組可查詢系統的壓力數據;控制管理模組按照獲取的壓力數據,通過智慧型控制算法確保系統壓力的平穩輸出,實現系統的恆壓控制 。
算法設計實現
設計的小型恆壓控制系統的關鍵任務是,控制步進電機的運行,完成系統計量泵的恆壓控制,主要對步進電機的速度和正反轉進行控制。系統採用自適應模糊PID控制算法,確保系統的恆壓輸出和電機的正常運行。該算法不僅具有模糊控制器的強抗干擾性,還具有PID控制的高精度優勢,具備較強的控制能力。系統採用壓力變送器以及光電編碼器,採集系統泵的輸出壓力和步進電機的轉速,並運算出壓力誤差值以及壓力誤差變化率,再通過模糊PID控制器調整誤差值,並將壓力校正值變換成對應的脈衝頻率,同時將其反饋給步進電機,對步進電機的速度進行調整,實現系統計量泵輸出壓力的平穩控制。
當前設計的小型恆壓控制系統在恆壓工作模式下的控制精度低,並且穩定性較差,存在較大的弊端。因此,這裡介紹的基於嵌入式 ARM 處理器的小型恆壓控制系統,系統的硬體以 S3C2440 晶片為控制核心,通過主控晶片的外圍接口擴展硬體電路,採用具有細分控制技術的電機驅動器和 S3C2440 晶片的 PWM 定時器,對步進電機轉速進行精密恆壓控制,並且實現系統的高精度和穩定性控制。採用模組化思想設計系統的硬體模組,主要包括主控模組、存儲模組、數據採集模組、電機驅動模組、通信模組等。系統實現部分給出了系統主程式流程,以及採用模糊 PID 智慧型控制算法實現恆壓輸出控制的過程。實驗結果表明,所設計系統具有較高的控制精度和穩定性 。
