組成及工作原理
慣性導航系統是以陀螺儀和加速度計為敏感器件的導航參數解算系統,該系統根據陀螺儀的輸出建立導航坐標系,根據加速度計輸出解算出運載體在導航坐標系中的速度和位置。慣性導航系統屬於推算導航方式,即從一已知點的位置根據連續測得的運動體航向角和速度推算出其下一點的位置,因而可連續測出運動體的當前位置。
MEMS是集微感測器、微執行器、微機械結構、微電源微能源、信號處理和控制電路、高性能電子集成器件、接口、通信等於一體的微型器件或系統。MEMS是一個獨立的智慧型系統,可大批量生產,其系統尺寸為幾毫米乃至更小,其內部結構一般在微米甚至納米量級。常見的產品包括MEMS加速度計、MEMS麥克風、微馬達、微泵、微振子、MEMS光學感測器、MEMS壓力感測器、MEMS陀螺儀、MEMS濕度感測器、MEMS氣體感測器等等以及它們的集成產品。
微慣導系統主要包含陀螺儀、加速度計、微處理器,根據實際需求還可增加磁力計、氣壓計等MEMS器件,其中:
•陀螺儀用來測量運動體圍繞各個軸向的旋轉角速率值,通過四元數角度解算形成導航坐標系,使加速度計的測量值投影在該坐標系中,並可給出航向和姿態角;
•加速度計用來測量運動體的加速度大小和方向,經過對時間的一次積分得到速度,速度再經過對時間的一次積分即可得到位移;
•磁力計用來測量磁場強度和方向,定位運動體的方向,通過地磁向量得到的誤差表征量,可反饋到陀螺儀的姿態解算輸出中,校準陀螺儀的漂移;
•氣壓計用來測量環境氣壓值,融合陀螺儀、加速度計數據輸出高度值。
形象的描述的話,陀螺儀知道“我們轉了個身”,加速度計知道“我們又向前走了幾米”,而磁力計知道“我們是向某個方向”的,氣壓計則知道我們“現在有多高”。
總而言之,微慣導系統是以低成本的通用MEMS器件為基礎,根據套用、誤差修正、誤差補償的需要結合使用上述感測器,充分利用每種感測器的特長,通過載體運動模式學習、濾波算法設計、硬體和結構設計等,達到高精度自主定位的目標。不依賴於導航衛星、無線基站、電子標籤等任何輔助設備或先驗資料庫,僅通過載體自身配置的小型微型慣性感測器,可完成任何場景下人員、車輛、機器人等的準確定位。
發展歷史
慣性導航系統最先套用於火箭制導,美國火箭先驅羅伯特·戈達德(ROBERT GODDARD)試驗了早期的陀螺系統。 二戰期間經德國人馮·布勞恩改進應後,套用於V-2火箭制導。 戰後美國麻省理工學院等研究機構及人員對慣性制導進行深入研究,從而發展成套用于飛機、火箭、太空梭、潛艇的現代慣性導航系統,然而成本及複雜性限制了其可以套用的場合。
“微慣導”的概念比較早的出現於2013年,“2013年4月25日,據法新社報導,美軍正研發新一代導航系統,用於替代易受干擾的GPS衛星定位系統。這一系統將不再依賴衛星,它將被集成在以立方毫米為單位的超小晶片上。”美國國防部高級研究計畫局(DARPA)提出的這個新一代導航系統主要通過集成在微型晶片上的原子陀螺儀、加速器和原子鐘精確測量載體平台相對慣性空間的角速率和加速度信息,利用牛頓運動定律自動計算出載體平台的瞬時速度、位置信息並為載體提供精確的授時服務。“一名中國軍事專家25日在接受《環球時報》採訪時稱,美軍所謂的新一代導航系統其實質是一種基於現代原子物理最新技術成就的微型慣性導航系統。”
國內方面,2014年湖南長沙國防科技大學成功研製了“基於微慣導的人員自主定位系統”,能夠在沒有衛星導航信號的環境下實現精確定位,產品的精度和穩定性均已達到國際領先水平。在建築物內部以及山區、密林等環境中,衛星導航信號存在盲區,基於微慣導的人員自主定位系統,不需要接收衛星導航信號或預先安裝外部設施,能夠實現自主、實時、準確定位。 這是國內首次開展基於微慣導的室內人員定位技術研究,中央電視台新聞聯播 、新聞頻道,湖南衛視等相關媒體也對此進行了連續報導。
國內外市場上也相繼湧現了一批進行微慣導定位技術研發的公司,早期產品的定位精度基本上為2%~5%,也就是說用戶行走1公里,位置誤差至少20米,這是無法滿足實際套用需求的,會延誤逃生、救援等和位置精度密切相關的應急任務,整個產品沒有達到真正實戰的技術指標,因此這部分產品也因技術不成熟而未能打開市場。近年,業內公開發售的微慣導定位產品中,最高的定位精度達到了0.3%,相當於走1公里誤差不到3米,可以適應<15km/h的走路、小跑、側移、後退等任意步行姿態,基本可以滿足實際套用需求。
分類
微慣導定位技術目前發展比較快,主要是用於緊急救援、軍事、工業等用途,就目前的主要套用來說,大概分為三種:
(1) 佩戴於人員腰部的微慣導模組,採用傳統PDR航位推算方案,精度一般。腰上的方案實用性更強,穿戴體驗更佳,但是對於側移、轉彎、原地踏步等特殊步態就會產生明顯的誤差積累。目前市面上的腰部慣導產品基本都可以達到2%的精度,走100米誤差達到2m,國外的某些產品採用了這類技術方案。
(2) 佩戴於人員足部的微慣導模組,基於足部運動模型開發,精度較高,相對穩定。目前業內已知的最高精度為0.3%,這一精度基本上能滿足應急任務的需求,消防、反恐、救援任務在建築物內行走距離不長,行走1km誤差累計3m,誤差基本可以接受。
(3) 放置在AGV、叉車等自動倉儲設備上的微慣導模組,獲取驅動輪數據後,可輸出穩健的定位結果。根據網上公開的數據,有些AGV微慣導產品已經可以達到運行30米,偏差5厘米的定位精度。二維碼、視覺、雷射、超寬頻等定位方式結合微慣導,可以極大的減小定位方案施工工作量、節約成本。
優點
1、 自主定位:不接收衛星信號,也不需要外部基站等輔助設備或先驗資料庫,給定了初始條件後,不需要外部參照就可確定當前位置、方向及速度;
2、 工作不受氣象條件、人為干擾影響和覆蓋範圍限制,可全天候、全時間地工作於空中、地球表面乃至水下、地下;
3、 不依賴於任何外部信息,也不向外部輻射能量,故隱蔽性好,不受外界電磁干擾、遮擋的影響,適用於各種複雜地理環境和外界干擾下的精確定位;
4、 能提供位置、速度、航向和姿態角數據,且能不斷測量位置的變化,精確保持動態姿態基準,所產生的導航信息連續性好而且噪聲低;
5、 數據更新率高、短期精度和穩定性好;
6、 與傳統的慣性導航系統相比,由MEMS陀螺儀、MEMS加速度計等構成的微慣性導航系統在成本、體積、重量、功耗等方面均具有顯著優勢,便於穿戴、攜帶、集成、布設。
缺點
1、 由於微慣導定位信息經過積分而產生,定位誤差隨時間而增大,長期精度差,需要外部的信息進行校準。就純慣導定位的精度來說,即使是0.3%的精度,在大場景長距離情況下,累積誤差仍然不可忽略;
2、 微慣導輸出為相對軌跡,需要外部輔助信息給出初始位置和方向,並將多個慣導的軌跡統一到一個坐標系中;
3、 微慣導系統作為可穿戴設備時,一般為電池供電,續航時間不長。
“微慣導+”的概念
微慣導定位在室內小場景中,經過長時間的行走後,角度和位置漂移並不明顯,因此在很多場景中並沒有使用其它輔助定位手段。但是這種微慣導獨立定位方式依然存在兩個弱點:
一是輸出為相對軌跡,需要將多個微慣導的軌跡統一到一個坐標系中;
二是在大場景長距離情況下,由於慣導固有的漂移率,仍然會有較大的累積誤差,需要外部的信息進行校準。
因此“微慣導+”的概念被提出,即以微慣導定位技術為核心,根據不同場景和需求,選用WiFi、藍牙、UWB、北斗/GPS、場景地圖信息或地磁信息等定位技術進行輔助定位,通過對微慣導累積的誤差進行校準,達到高精度的定位目的。
“微慣導+藍牙”
藍牙信標可套用於室內定位,但是信號發射範圍比較小,而且容易受到環境包括人體的遮擋和干擾,定位精度不高,一般在3米左右。但藍牙設備體積小、重量輕、功耗小、成本低,布設起來較為方便,比較適合消防救援等不方便布設太多外部定位設備的應急任務場景,也同樣適合一些對成本要求較高的領域。
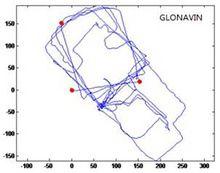 微慣導定位結果
微慣導定位結果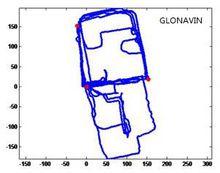 微慣導+藍牙定位結果
微慣導+藍牙定位結果“微慣導+藍牙”通過藍牙信標進行間或校準,可以將微慣導定位過程中累積的位置和方向漂移進行校準,並對多人相對位置進行標定,不需要需任何地圖信息融合,能夠長時間維持在一個穩定的可接受的精度範圍。這種融合式的定位方案部署簡單,可以滿足應急任務室內定位的需求。
“微慣導+超寬頻(UWB)”
超寬頻作為主流的定位技術之一,具有抗多徑、精度高的特點,定位精度可以達到分米級,甚至厘米級。但超寬頻基站成本比較高,信號容易受到金屬、建築物和人體遮擋的影響,難以實現大範圍部署。
“微慣導+超寬頻”的定位方式通過超寬頻測距信息對微慣導累積的誤差進行校正,同時實現多人/多終端軌跡標定。這種方式定位精度比較高,比較適合在一些重點區域如化工廠、核電站、電站、貨場、物流等環境較為複雜的場景進行定位,也可滿足多人大場景虛擬現實(VR)定位的需求。
“微慣導+北斗/GPS”
北斗/GPS等導航衛星定位技術成熟、套用廣泛,在開闊區域定位性能好。但是進入室內或者複雜環境時,由於受到遮擋導致定位精度下降甚至形成定位的盲區。
“微慣導+北斗/GPS”的定位方式適用於對室內外定位都有需求的場景。在室內或複雜環境,衛星定位存在盲區,採用微慣導進行獨立定位;在衛星信號較強的區域,兩種方式進行融合定位,一方面可利用北斗/GPS的定位信息對微慣導的誤差進行校準,另一方面可通過卡爾曼濾波輸出穩健的高精度的定位結果。
“微慣導+地圖”
“微慣導+地圖”的定位方式適用於已知建築物規則結構信息的室內場景。通過一般慣性感測器定位算法解算得到初級定位結果,然後根據矩形結構建築物內的八個先驗方向在粒子濾波算法框架內調整粒子權值,校正航向漂移,最後經過重採樣可以得到軌跡修正後的定位結果,其中八個先驗方向包含矩形四個邊的朝向與四個經插值得到的輔助方向。
這種定位方式可利用建築物的矩形結構對定位結果進行航向校正,顯著提高定位精度,穩定性較高,在行走軌跡複雜的條件下,仍能準確判斷航向。定位結果可以反映行走軌跡的細節,降低了航向漂移,提高室內定位的精確度,從而減緩或抑制了長時間持續定位結果惡化。這種定位方式可進一步減少輔助定位基站數量,降低定位系統複雜度。
套用領域
在城市、建築物內、山區、密林、地下等環境,常規的衛星定位手段常常會失效,不依賴任何外部設備或先驗資料庫的微慣導就是用於解決這些場景下的準確和實時定位難題。可以說微慣導技術不僅在國防現代化中占有十分重要的地位,在國民經濟各個領域中也日益顯示出它的巨大作用。
軍用領域
微慣導在軍用領域已經得到了比較成熟的套用,特別適合於在高層建築或複雜大型建築中的消防救援,以及特種作戰、反恐處突、打擊犯罪、搶險救災等應急任務場景的室內、地下定位套用,滿足軍隊、武警、消防、應急等部門執行緊急任務的需求,這些緊急任務場景往往來不及或不方便布設太多的外部定位基站等設備。另外微慣導還適用於軍警部隊平時進行村落反恐、城市反恐等可控場景訓練,展示單兵分布情況、訓練態勢。
2016年9月28日,公安部消防局大跨度大空間建築滅火救援實戰演練在江蘇南京舉行,這次演練採用的消防員綜合監測指控系統包含了微慣導定位產品,標誌著微慣導正式在消防救援領域得到實際套用。
民用領域
微慣導在民用領域同樣具有很大的套用價值,它能夠在隧道、涵洞、山谷等這些導航衛星信號無法接收的地點完成測繪和勘查任務。
在化工、礦區、電站、核電站、貨場、物流等環境較為複雜的場景,往往存在嚴重的遮擋、多徑等問題,導航衛星及常規的UWB、RFID、WiFi、藍牙等技術定位精度很差,並且特殊的廠區環境無法布設太多的基站等外部設施。為了確保人員的安全和良好的工作秩序,需要對人員進行高精度定位以進行監控。採用“微慣導+基站稀疏配置”定位技術,在廠區布設極少量的輔助定位基站,可實現人員的自主、實時、連續、準確定位。
在AGV搬運機器人定位需求越來越旺盛的自動化倉儲領域,大部分定位技術需要通過場地改造(鋪磁軌、貼色帶、貼地標二維碼、安裝雷射反射板)來實現,這些外部設施的搭建使得建設及維護成本高,受環境的限制大,靈活性也較差。微慣導技術套用於AGV導航是目前一種比較新興的方式,不依賴於任何外界設備(不需要鋪設磁條、布置雷射反射板等),不受外界電磁干擾的影響,且擺脫了傳統方式的環境限制。在AGV的實際套用場景中,倉儲、工廠等面積往往比較大,在大場景長距離情況下,由於慣導固有的漂移率,仍然會有較大的累積誤差,需要外部的信息進行校準,微慣導結合雷射、視覺、二維碼、UWB等技術可提供高效、低成本的解決方案。
另外,微慣導技術在老人小孩防走丟、無人機運動控制、機動車輛自動/無人駕駛、地下車庫定位和導航等消費領域也有著比較好的套用前景。
