
背景
無人機(UAV)是一種由人在地面或母機上進行遙控的飛行器,上面裝有自動駕駛儀、程式控制系統、遙控與遙測系統、自動導航系統、自動著陸系統等,通過這些系統實現遠距離控制飛行。由於無人機具有機動靈活、無人員傷亡、·空勤保障簡單、必要時可與敵人同歸於盡等優點,所以它在現代高技術局部戰爭中發揮著越來越重要的作用。但是無人機缺少飛行員,飛機出現故障時,缺少人的智慧型決策能力,容易造成任務失敗。對於空軍力量強大的對手而言,目前現役的主戰飛機都具有良好的機動性能,一旦被發現,將對無人機構成極大威脅,極易被攻擊而造成損傷。從國內外高可靠性飛行控制系統發展來看,為保證無人機能夠可靠地完成偵察、監視等任務,要求無人機的飛控系統具有高可靠性、高生存力,以最大限度地保證無人機和設備的安全。
無人機最先套用于軍事,但由於其具有機動性強、靈活性高、成本低廉等特點,各國相繼大力開展了民用無人機的研發和使用。因此,無人機被作為一種理想的飛行平台廣泛套用於航拍測繪、通信中繼、搶險救災等各個領域。但是,由於無人機飛行情況複雜且易受外界環境干擾,飛行過程中不免會產生故障。其中GPS失效就是一個常見問題,由於GPS失效後無人機無法正確找到經緯坐標,導致無人機不能順利返航,因此研發針對GPS失效等一系列故障的應急處理技術是目前乃至今後一段時間無人機研究領域的熱點。
失控返航過程
飛行器在飛行過程中,前視避障的攝像頭會對場景地形進行實時掃描,並通過獲取的障礙物位置信息來構建
3D地形圖。
 失控返航
失控返航如下動圖中,飛行器穿過城市樓宇抵達拍攝地“球形歌劇院”,成功完成“環繞航拍”後飛向下一拍攝目標。
當飛行器抵達樓宇背面時,控制信號被遮擋,遙控器中斷,飛行器懸停6秒觸發“失控返航”。
 失控返航
失控返航飛行器會參考原路徑返航,並通過前視避障已構建的地形圖,進行路徑規劃。若按已規劃的路徑返航1分鐘內,重新獲取信號,飛行器進入懸停狀態,等待遙控器控制指令。
 失控返航
失控返航返航設定
(1)遙控器設定為固定翼模式,設定好後,關機,再按正常開機,進入選單列表找到輔助通道設定;
(2)進入輔助通道設定選單。將手中的遙控器和圖上設定完全一致。這裡分別對飛控的飛行模式等相關通道進行設定,也還可以根據自已的使用習慣進行設定。
(3)返回到上一級選單選擇到舵角設定,把起落架和襟翼2個選項的數值按下述參數值設定為68%,完成設定退出到上一級選單。
(4)返回上一級選單切換到高級設定,選擇到可程式普通混控1 。
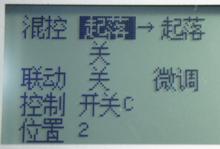
(5)按下列參數進行設定,該設定是對一鍵返航進行設定並設定(關於返航相關細節與注意事項查看相關說明書。)如果需要暫時禁止該功能將第2排的關設定為禁用即可。其中:控制開關C指的是用哪個開關來進行一鍵返航操作,這裡指定的是用C鍵,位置2指的是的開關C扳在哪個位置時開啟開一鍵返航時,0位置為正常飛行2位置為啟動返航。可根據自已的習慣自已設定,如果你選擇開關C以及其工作位置時,下圖的第二行的模式“開、關、禁用”中開或關無法選擇,說明遙控器上開關C的扳位不正確,需將它扳回來。
 失控返航
失控返航