
天文導航
所謂自主導航技術是指不與外界進行信息的傳輸和交換,不依賴於地面設備的定位導航技術。天文導航是利用光學敏感器測得的天體(太陽、月球、地球、行星和恆星)的信息進行載體位置計算的一種定位導航方法。天文導航和慣性導航技術一樣同屬於自主導航技術。
天文導航是在航天、航海和航空領域正在得到廣泛套用的自主定位導航技術。尤其對登月、載人航天和遠洋航海是必不可少的關鍵技術,還是衛星和遠程飛彈和運載火箭、高空遠程偵察機等的重要輔助導航手段。
天文導航特點有:
1,和慣性導航技術同屬於自主導航技術
所謂自主導航技術是指不與外界進行信息的傳輸和交換,不依賴於地面設備的定位導航技術。天文導航是利用光學敏感器測得的天體(恆星、近天體)的信息進行載體位置的計算。天文導航和慣性導航技術一樣同屬於自主導航技術。
2,定位精度不很高,但誤差不積累,其精度取決於光學敏感器的精度
相比其他導航方法來說,天文導航的精度不是最高的,但其不像慣性導航存在誤差隨時間積累的問題,這一點對長時間運行的載體來說是非常重要的。天文導航的定位精度主要取決於光學敏感器的精度。
3,不僅可以提供位置信息,還可以提供高精度的姿態信息
但天文導航也存在不足之處:在某些情況下受外界環境的影響—如氣候條件;存在輸出信息不連續的問題。
天文導航原理
天文導航是以太陽、月球、行星和恆星等自然天體作為導航信標,以天體的地平坐標(方位或高度)作為觀測量,進而確定測量點地理位置(或空間位置)及方位基準的技術和方法。
 天文導航系統
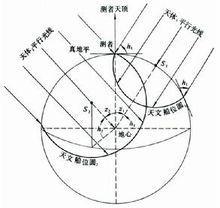
天文導航系統航空和航天的天文導航都是在航海天文導航基礎上發展起來的。航空天文導航跟蹤的天體主要是亮度較強的恆星。航天中則要用到亮度較弱的恆星或其他天體。以天體作為參考點,可確定飛行器在空中的真航向。使星體跟蹤器中的望遠鏡自動對準天體方向,可以測出飛行器前進方向與天體方向(即望遠鏡軸線方向)之間的夾角,即航向角。由於天體在任一瞬間相對於南北子午線之間的夾角(即天體方位角)是已知的。這樣,從天體方位角中減去航向角就得到飛行器的真航向。通過測量天體相對於飛行器參考面的高度就可以判定飛行器的位置。以地平坐標系在飛行器上測得某星體C的高度角h,由90°-h 可得天頂距z,以星下點(天體在地球上的投影點)為圓心,以天頂距z所對應的地球球面距離R為半徑作一圓,稱為等高圓。在這個圓上測得的天體高度角都是h。同時測量兩個天體C1、C2,便得到兩個等高圓。由這兩個圓的交點得出飛行器的實際位置 M 和虛假位置M′。再用飛行器位置的先驗信息或第三個等高圓來排除虛假位置,經計算機解算即得出飛行器所在的經、緯度(λ、φ)。
套用範圍
1,長時間運行的載體
航空:遠程偵察機、運輸機、轟炸機。
航天:衛星、飛船、空間站、深空探測、遠程飛彈。
航海:艦船、潛艇。
2,要求高導航定位精度的領域。
3,要求自主定位導航的領域。
天文導航系統的分類
按照觀測星體數目多少,天文導航分為單星導航和多星導航。單星導航也稱為跟蹤式導航,需要星跟蹤器有伺服轉台保持對星體的跟蹤;多星導航也稱星圖匹配式導航,需要在星敏感器視場中觀測到三個以上的星體。各星體之間的方位角差最好在60°~90°之間(越接近 90°越好),高度(俯仰角)最好在 15°~6°之間,星圖匹配式導航的精度要優於跟蹤式導航。
按照星體的峰值光譜和光譜範圍分,天文導航可分為星光導航、射電天文導航。觀測星體的可見光導航和紅外導航叫星光導航,而接收天體輻射的射電信號進行導航的叫射電天文導航。
根據測星定位定向原理,天文導航可分為 3 種體系結構:
一是基於六分儀原理的天文導航系統,二戰前,天文定位是主要的導航手段,許多艦船都配備了天文導航的各種儀表、天文鐘和手持航海六分儀。二戰後,出現了六分儀和潛望鏡相結合的套用。
二是基於"高度差法"的天文導航系統,這種系統具有兩個特點:
(1)導航過程中要依賴於慣導平台提供的水平基準。
(2)系統光學解析度高,抑制背景噪聲能力強,導航精度高。
三是基於星圖識別的多星矢量定位技術的天文導航系統。該系統具有如下特點:(1)大視場光學系統。視場內平均三顆以上的星體被利用,這樣可以提高系統捕獲星體的機率和導航精度;(2)不需要任何外部信息,直接輸出系統相對於慣性空間的姿態,因而能對陀螺誤差進行直接校正;(3)確定運載體慣性姿態的精度是現有設備中最高的;(4)系統在大氣層以內工作時,受天候影響較大,可靠性有待進一步提高。
按照安裝平台劃分,可分為海基、陸基、機載、彈載、天基 5 種套用平台。
發展趨勢
 天文導航系統
天文導航系統隨著微電子與計算機技術、光電探測技術的不斷發展以及軍事領域和太空探索的更高需求,天文導航技術今後的發展趨勢是:
(1),發展多波段、小型、高精度、全自動、全天候光電天文導航系統。
(2),向自主導航方向發展,主要解決高精度水平基準問題。
(3),提高天文導航系統的導航數據輸出率、可靠性和方便性。
(4),研製新型的紅外波段(主要是0.85~3
(5),未來的天文定位系統的精度可能達到l角秒,定位精度達到30米,從而在激烈的戰爭環境下可替代GPS設備。
(6),未來幾年,大視場光電天文導航系統主要朝以下幾個方向發展:用APS感測器代替CCD感測器。APS的優勢在於:提高了輻射阻抗、大的動態範圍、獨立的像素積分時間控制等。使用一片SOPC式微控制器和幾塊ASIC晶片(用FPGA技術實現)就能滿足跟蹤器對控制和處理電路的要求。這樣,跟蹤器的質量和大小就主要取決於光學部件,從而使整個系統的的成本大大減小而套用卻進一步擴大。採用50_300的大視場和小焦距光學系統。
