
簡介
 SPDM艙外機器人系統就是一個小型的機械臂
SPDM艙外機器人系統就是一個小型的機械臂在軌衛星捕捉涉及到空間交會對接,在變軌機動後抵達預定的軌道,並與目標衛星形成一個組合體,其涉及到全向自由度的控制技術,其中還有很強的動力學耦合。空間對接技術也是在軌衛星捕獲的雛形,對接需要來那個看天氣有著一樣的接口構型,要相互匹配,另一種在軌捕獲就是通過機械臂實現。
技術使用
2012年7月20日,中國使用“一箭三星”將“創新三號”、“試驗七號”以及“實踐十五號”送入軌道。
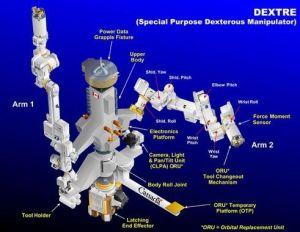
“試驗七號”上可能搭載的機械臂裝置,類似的任務還有太空梭在軌捕捉,通過SRMS空間機械臂將在軌衛星抓住,兩者形成軌道組合體,可以對衛星進行維修,比較典型的任務就是維修哈勃空間望遠鏡,國際空間站也有類似的機械臂,SPDM艙外機器人系統就是一個小型的機械臂。
技術類型
 在軌捕獲衛星使用6自由度的機械臂系統
在軌捕獲衛星使用6自由度的機械臂系統在軌捕捉最常見的就是機械臂裝置,但是還有諸如網狀的捕捉技術,通過衛星平台向目標衛星方向發射出一張大型網,將整個目標衛星都包裹起來,這種方法沒有機械臂強,無法長期進行在軌作戰。
一個典型的在軌捕獲衛星使用6自由度的機械臂系統,同時也要配備實時的視頻成像系統,在捕獲過程中使用雷射測距,遠地點控制發動機。美國太空梭使用的SRMS空間機械臂為6個自由度,質量為0.4噸左右,在失重環境下可以控制260噸左右的物體,所以此類機械臂控制衛星是綽綽有餘的,整體結構由三個活動關節組成,還有兩個臂桿系統,計算機系統可以即使將機械臂的狀態告知太空人。如果在反衛星平台上安裝機械臂,顯然要在視頻監視等感測器控制的環境下將機械臂運動的方向、角度和速度及時反饋地面。
技術特點
在機械臂捕獲過程中,如果是熟悉的目標,那么問題不大,如果是敵方衛星,那么就存在一定的不可預知性,就是說不知道敵方衛星具體外形,在捕獲過程中我方衛星和目標衛星之間可能出現較強的動力學耦合問題,這樣在機械臂末端捕獲時如何控制就是一個難題,直接導致的問題是抓住目標衛星後如何控制姿態,這就對機械臂末端的設計提出更高的要求。
技術執行
軌捕獲。
配套技術
一個典型的在軌捕獲衛星使用6自由度的機械臂系統,同時也要配備實時的視頻成像系統,在捕獲過程中使用雷射測距,遠地點控制發動機。
“試驗七號”等進行的衛星捕獲實驗中作為關鍵的在於天基目標測量,需要掌握兩個太空飛行器的相對姿態信息,這樣才能從對目標太空飛行器實施靠近作業,至少要能感知目標太空飛行器的幾何構型,哪個部位適合“下手”,綜合判斷目標太空飛行器是否可以滿足捕獲條件,這直接關係到捕獲的成敗。在中國前幾次的空間互動對接任務中,交會雷達是一個重要節點,主要使用了Ku波段、毫米波段還有雷射雷達等措施,尤其是雷射雷達,在測量精度和解析度上都較好。反衛星平台上使用CCD光學測量技術也有重要的用途,可以提供在軌捕獲時的圖像數據,對兩個太空飛行器相對姿態的判斷非常重要,其主要用於近距離的接觸,作用範圍也比雷射雷達和微波雷達要小很多,大概在幾百米的近距接觸上有著非常好的效果。
