
結構框架
 四旋翼飛行器
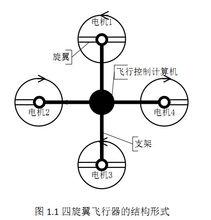
四旋翼飛行器四旋翼飛行器採用四個旋翼作為飛行的直接動力源,旋翼對稱分布在機體的前後、左右四個方向,四個旋翼處於同一高度平面,且四個旋翼的結構和半徑都相同,旋翼1 和旋翼3 逆時針旋轉,旋翼2 和旋翼4 順時針旋轉,四個電機對稱的安裝在飛行器的支架端,支架中間空間安放飛行控制計算機和外部設備。
典型的傳統直升機配備有一個主轉子和一個尾漿。他們是通過控制舵機來改變螺旋槳的槳距角,從而控制直升機的姿態和位置。四旋翼飛行器與此不同,是通過調節四個電機轉速來改變旋翼轉速,實現升力的變化,從而控制飛行器的姿態和位置。由於飛行器是通過改變旋翼轉速實現升力變化,這樣會導致其動力不穩定,所以需要一種能夠長期確保穩定的控制方法。四旋翼飛行器是一種六自由度的垂直起降機,因此非常適合靜態和準靜態條件下飛行。但是四旋翼飛行器只有四個輸入力,同時卻有六個狀態輸出,所以它又是一種欠驅動系統。
四旋翼飛行器的結構形式如圖1所示,電機1 和電機3 逆時針旋轉的同時,電機2 和電機4 順時針旋轉,因此當飛行器平衡飛行時,陀螺效應和空氣動力扭矩效應均被抵消。與傳統的直升機相比,四旋翼飛行器有下列優勢:各個旋翼對機身所施加的反扭矩與旋翼的旋轉方向相反,因此當電機1 和電機3 逆時針旋轉的同時,電機2 和電機4 順時針旋轉,可以平衡旋翼對機身的反扭矩。
數學建模
非線性數學模型
對於四旋翼飛行器來說,選用恰當的坐標系,可使運動方程的形式簡單,便於分析和求解。描述飛行器的轉動和移動,可以選用機體坐標系。確定飛行器的位置,必須選用地面坐標系。上述坐標系是笛卡爾右手定則直角坐標系。定義的兩個坐標系如圖2 所示,分別為地面坐標系E(X ,Y, Z)和機體坐標系B( Xb, Yb, Zb ) 。
內部設計
 四旋翼飛行器
四旋翼飛行器控制航行姿態的依據就是航姿感測器輸出的信號。航姿感測器至少包括傾角感測器和角速度感測器。而傾角感測器可以利用三軸加速度感測器間接實現。既然是加速度感測器,那么它輸出的信號表征的是當前三個軸向的加速度值,如果飛行器在空間中保持靜止,那么加速度值通過簡單的換算就可以得到真實的傾角參數。
但是飛行器在空間中是不可能時刻保持靜止不動的,譬如在側風的影響下,飛行器可能會向某一個方向偏離,那么此時即使飛行器確實保持水平,但三軸加速度感測器的輸出仍會偏離中心值,造成控制核心的誤判。
為避免這種情況的出現,則需要引入三軸角速度感測器和超聲測距儀,利用三個軸向上的角速度和Z軸方向上的加速度以及實時高度的變化率對X、Y軸方向上的加速度進行校正,從而得出真實的傾角信息。感測器的輸出信號經過模擬放大和模擬濾波之後送入AD變換電路轉換為數位訊號送入MCU(Microprocessor Control Unit ),由MCU進行包括但不僅限於kalman濾波等的數位訊號處理,再依據MCU中的整套航姿控制算法得出控制量,送入專司電機控制的MCU中對電機進行實時控制,同時要避免各感測器間結果的衝突乃至矛盾。
