介紹
自然旋轉轉彎是華爾茲舞廳使用的舞廳舞步。 它通常用於推進幾個7/8的旋轉舞蹈線,儘管旋轉轉彎對於轉彎也非常有用。 自然旋轉也被認為是學習樞紐的中間步驟。
相比於旋轉轉彎,原地轉向只需要非常小的空間,因此被用於許多空間狹窄的工程上。原地轉向缺點是對於地面以及履帶的負荷相當大,以及為了讓履帶能夠左右反轉,需要有相當複雜的傳動系統。
發展
在坦克方面上,即使在第二次世界大戰中,能夠使用原地轉向的車輛也屬少量,乃因當時的技術不純熟,並且為了快速生產,許多車輛並沒有採用。在當時,英國有邱吉爾坦克、克倫威爾坦克。而在德國,自從三號坦克便出現了此類系統,之後的四號坦克、虎式坦克也都能夠進行原地轉向,尤其在重型坦克上大量採用,但履帶容易脫落,並且傳動系統容易故障。在美國,戰後的M41華克猛犬和M46巴頓坦克使用的交叉傳動式變速器則是一個較可行的方案,因此後來陸續為各國所採用。
在現代,幾乎所有包括北約成員在內的西方主坦克皆能夠使用原地轉向,日本陸上
 圖2
圖2自衛隊的74式坦克、90式坦克和10式坦克也可使用 。
蘇聯由於戰術思想原因並不重視該功能,所製造的坦克都幾乎無法進行原地轉向。包含由蘇聯坦克改變而來的許多中國坦克以及東方集團的坦克也沒有此功能。新型阿瑪塔重型履帶通用平台是俄羅斯少數有此功能的車系。。20世紀90年代,中國在出口用的90-II式坦克上引進西方自動變速箱,首次實現了車體的原地轉向。經過7年的技術攻關,中國於21世紀初成功自主研製出新型國產綜合傳動裝置,並裝備於99A式坦克和VT-4主戰坦克等第三代主戰坦克的改進型,這些坦克都具備原地轉向功能。
原地轉向電動汽車方案設計
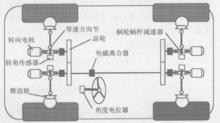 圖1
圖1如圖1所示 , 原地轉向電動汽車的 4 個車輪獨立驅動 , 獨立轉向 , 因此 4 個車輪可採用相同的結構形式。 4 個車輪由 4 個轉向電機獨立驅動 , 方向盤與車輪轉向器之間無機械連線 , 即採用線控轉向。圖2
為方向盤操縱機構 3 維模型 , 線控轉向的控制系統原理如圖3所示。 ECU 檢測方向盤角度電位器獲得方向盤轉角 , 並通過轉向控制器計算各車輪轉角 , 每個車輪均由 PI 控制器構成角度位置閉環。根據4個車輪的輪速計算車速 , 根據車速和方向盤轉角計算路感 , 路感電機通過蝸桿減速器在方向盤轉向管柱上施加反力以模擬路感。
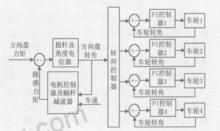 圖3
圖3 圖4
圖4圖4為原地轉向電動汽車的懸架和轉向機構3維模型。電動輪由外轉子式輪轂電機、輪輞、盤式制動器組成。雙橫臂懸架與傳統的雙橫臂懸架導向機構不同 , 轉向主銷通過轉向支架與上下橫臂相連 ,主銷軸線與上下橫臂鉸鏈中心連線平行而不重合 ,所以車輪只繞轉向主銷軸線旋轉。上橫臂與轉向支架之間採用虎克鉸以避免轉向支架自轉 , 轉向主銷通過上下兩個球鉸與轉向支架相連。轉向時 , 轉向電機通過蝸桿減速器減速 , 經萬向節驅動安裝在轉向支架和主銷上的一對錐齒輪 , 帶動車輪轉動。兩個萬向節之間採用花鍵聯接 , 消除了車輪上下跳動時由轉向機構引起的附加轉向。扭桿彈簧採用上置式 , 減振器可傾斜布置在車架之間。
