合理套用
攝影技術

由於動態模糊是相機、物體、背景間相對運動而造成的效果,可藉著移動鏡頭追蹤移動的物體來避免。因此,即使在長時間曝光下,背景比較模糊而物體看起來仍然清晰。
電腦動畫
類似地,即時電腦動畫中準確地顯示瞬時的畫面(像是一台有無限快快門的相機),而沒有動態模糊。因此每秒25-30張畫面的電玩遊戲看起來斷斷續續不自然,而用相同畫面更新率拍攝自然動作看起來卻是連續的。很多新世代電玩遊戲以動態模糊為特色,尤其是賽車模擬遊戲。預先運算生成的電腦圖像中,如電腦合成影像CGI的電影,可以繪出逼真的動態模糊,因為渲染器(renderer)有更多時間來繪製每個畫面。時間上避免失真需依照許多瞬間時間的組合來製造畫面。圖2:動態模糊經常被使用在運動(尤其是機車運動)的攝影上以表現出速度感。為了達到效果,必須使用慢快門並且讓相機鏡頭隨著物體的運動慢慢地轉向
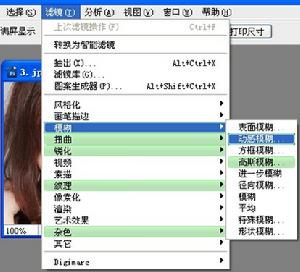
Photoshop中的套用
Photoshop中的濾鏡選單下有“動態模糊”這一操作,可以將照片處理成高速運動下被攝影機拍下的
負面效果


人眼習慣看到動態模糊,因此習慣電視或電影中的運動模糊甚至不會注意到。電腦產生的影像在時間上很分明,沒有動態模糊而使動態效果降低,看起來不逼真。
有時候可用反卷積(反折積)(deconvolution)從圖片中移除動態模糊。
構建模型
影響模糊的參數
1 角度
0度~360度,不同角度會造成不同的模糊類型。
2 長度
長度為移動多少間隔的像素。
圖4:這些城市燈光是固定的而相機的方向在曝光期間改變。虛線是由於相機來回移動造成的每盞燈的個別軌跡。
動態模糊的類型
1 線性動態模糊發生在單一方向的模糊。鏡頭的角度會影響動態模糊線條的角度;濾鏡的半徑長度會影響模糊強度,長度越長會越模糊。
2 鏇轉
產生像物體在鏇轉的環狀動態模糊。此類型的模糊以鏡頭對準的點為中心,角度為主要影響因素,角度變化越大越模糊。
3 縮放
縮放型的動態模糊是以圖片中心為中心輻射開來的模糊。圖片中心未發生模糊但以圖片中心為準的外圍卻會模糊,會讓人有凸顯圖片中心的動態感覺。鏡頭的縮放長度為主要影響因素。
圖5:卡車和相機在曝光期間皆移動。因為移動相機或搖動鏡頭來固定指向卡車駕駛座旁的門,所以地面看起像往卡車後方移動。
數學模型
1 模糊
假設有一清晰平面圖片y(x),我們只能觀察到其模糊後的圖片,psf(x)為已知的點擴散函式PSF(Point Spread Function),表示卷積(折積)(convolution)。假設此卷積為離散且有噪聲,我們觀察到的圖片可表示成:
ε(x)為噪聲。 x為分布在整齊的n1×n2格子X中,X = {k1,k2:k1 = 1,2,...,n1,k2 = 1,2,...,n2}。
2 動態模糊
最簡單的動態模糊模型可用直線型點擴散函式以離散卷積形式表示為:
≤L / 2,
psf(x1,x2) = 0,otherwise.
L為核kernel的長度,由運動速率決定,斜率β則由運動方向決定。此模型假設圖片中的所有像素的移動皆相同。
去除效果
關鍵因素

圖6:相對於車輛的快速移動相機快門速度較慢,街道上的車流留下亮眼的光線。
去模糊方法
1 天真法-快速傅立葉轉換去模糊法(FFT Deblurring)快速傅立葉去模糊法是非常簡單的方法之一: 頻域的去模糊運算可表示為模糊影像的傅立葉轉換和點擴散函式的傅立葉轉換的乘積。
b(x) = psf(x) * o(x) + n(x)
B(k) = PSF(k)O(k) + N(k)
因此去模糊可以簡單地用點擴散函式傅立葉轉換的倒數MTF(k)來表示。
B / MTF = O + N / MTF 當符合下列兩條件時有很好的效果:
a)模糊影像沒有被噪聲。
b)MTF沒有零點(zeros)。
但實際上不管是否符合上述2條件,噪聲仍會被放大(看N/MTF那項)。
2 非遞迴法-Wiener濾波器去模糊法(Wiener Filter Deblurring)
均方誤差(MSE)最佳化線性去模糊

圖7:夜間搭上在聖荷西國際機場上方剛起飛的飛機。城市燈光形成同心線條。
3 遞迴法- Lucy-Richardson去模糊法(Lucy-Richardson Deblurring)
Lucy-Richardson、Regularized 和 Wiener去模糊法都是針對反折積運算下,因噪聲影響和混沌蝴蝶效應所造成影像錯誤,不同的是,Lucy-Richardson去模糊法是遞迴式的。Lucy-Richardson利用條件機率的貝氏定理反覆運算,並將去模糊處理前後的影像作比較,消除噪聲的部分,得到增強的結果。
兩個關鍵的理解帶出了最後的公式:
1)貝式公式中的機率可以用像素的亮度取代。
以下解釋可以更明白:光子在一訂時間內碰到感測像素的機率和像素的亮度成正比。
2)條件機率矩陣:p(bk | oj)是點擴散函式psfki。
