
歷史發展
最原始的制動控制只是駕駛員操縱一組簡單的機械裝置向制動器施加作用力,這時的車輛的質量比較小,速度比較低,機械制動雖已滿足車輛制動的需要,但隨著汽車自質量的增加,助力裝置對機械制動器來說已顯得十分必要。這時,開始出現真空助力裝置。1932年生產的質量為2860 kg的凱迪拉克V16車四輪採用直徑419. 1 mm的鼓式制動器,並有制動踏板控制的真空助力裝置。林肯公司也於1932年推出V12轎車,該車採用通過四根軟索控制真空加力器的鼓式制動器。
隨著科學技術的發展及汽車工業的發展,尤其是軍用車輛及軍用技術的發展,車輛制動有了新的突破,液壓制動是繼機械制動後的又一重大革新。Duesenberg Eight車率先使用了轎車液壓制動器。克萊斯勒的四輪液壓制動器於1924年問世。通用和福特分別於1934年和1939年採用了液壓制動技術。到20世紀50年代,液壓助力制動器才成為現實。
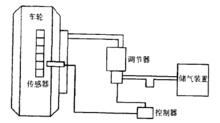
20世紀80年代後期,隨著電子技術的發展,世界汽車技術領域最顯著的成就就是防抱制動系統(ABS)的實用和推廣。ABS集微電子技術、精密加工技術、液壓控制技術為一體,是機電一體化的高技術產品。它的安裝大大提高了汽車的主動安全性和操縱性。防抱裝置一般包括三部分:感測器、控制器(電子計算機)與壓力調節器。感測器接受運動參數,如車輪角速度、角加速度、車速等傳送給控制裝置,控制裝置進行計算並與規定的數值進行比較後,給壓力調節器發出指令。下圖是防抱死系統基本迴路。
 制動控制系統
制動控制系統1936年,博世公司申請一項電液控制的ABS裝置專利促進了防抱制動系統在汽車上的套用。1969年的福特使用了真空助力的ABS制動器;1971年,克萊斯勒車採用了四輪電子控制的ABS裝置。這些早期的ABS裝置性能有限,可靠性不夠理想,且成本高。1979年,默·本茨推出了一種性能可靠、帶有獨立液壓助力器的全數字電子系統控制的A BS制動裝置。1985年美國開發出帶有數字顯示微處理器、複合主缸、液壓制動助力器、電磁閥及執行器“一體化”的ABS防抱裝置。隨著大規模積體電路和超大規模積體電路技術的出現,以及電子信息處理技術的高速發展,ABS以成為性能可靠、成本日趨下降的具有廣泛套用前景的成熟產品。1992年ABS的世界年產量已超過1000萬輛份,世界汽車ABS的裝用率已超過2000。一些國家和地區(如歐洲、日本、美國等)已制定法規,使ABS成為汽車的標準設備。
現狀
自1885年汽車誕生開始,車輛制動系統就在車輛的安全方面就扮演著重要的角色。車輛發展初期,車輛低速行駛、交通密度小,對制動系統的要求相對較低。最原始的制動控制只是駕駛員操縱一組簡單的機械裝置向制動器施加作用力,由於車輛的質量比較小,速度比較低,機械制動已能滿足車輛制動的需要。但隨著車輛質量的增加,開始出現真空助力裝置。1932年生產的質量為2860kg的凱迪拉克V16車四輪採用直徑419.1mm的鼓式制動器,並有制動踏板控制的真空助力裝置。林肯公司也於1932年推出V12轎車,該車採用通過四根軟索控制真空加力器的鼓式制動器。
二十世紀初期,隨著科學技術的發展及車輛工業的發展,尤其是軍用車輛及軍用技術的發展,車輛制動有了新的突破,液壓制動是繼機械制動後的又一重大革新。Duesenberg Eight車率先使用了轎車液壓制動器。克萊斯勒的四輪液壓制動器於1924年問世。通用和福特分別於1934年和1939年採用了液壓制動技術。到20世紀50年代,液壓助力制動器成為現實。
上世紀80年代後期,隨著電子技術的發展,世界車輛技術領域最顯著的成就就是防抱制動系統(ABS)的實用和推廣。ABS集微電子技術、精密加工技術、液壓控制技術為一體,是機電一體化的高技術產品,可以在完全制動時仍能保證車輛的可操縱性和方向穩定性。之後ASR, ESP等獲得了陸續發展。ASR(驅動防滑轉控制)可幫助駕駛員在車輛起步和加速時阻止驅動輪滑轉,提高行駛穩定性。ESP(電子穩定性程式)可在危險的行駛情況下利用瞬間干預發動機輸出轉矩和制動器,保持車輛穩定,並沿車道行駛。所有這些改善車輛的制動性能的措施,大大提高了車輛的主動安全性和操縱性。
發展趨勢
電子機械制動(EMB)
1996年,德國Bosch公司在美國專利局申請了關於電子機械制動(EMB)的專利,之後12項相關專利相繼被申請;EMB慢慢引起人們的關注,漸漸成為制動系統的發展趨勢之一。EMB為“ELECTROMAGNETIC WHEEL BRAKE DEVICE”的簡寫。
EMB可分為兩類:電子液壓式制動(EHB)系統和電子機械式制動(EMB)系統。EHB系統利用電子控制系統同時保留了部分的液壓系統,液壓系統是一個備用系統,避免系統的電子部分出現故障。EHB系統可以看作是EMB系統的一個先期產品,EHB也不會長期得到使用,因為它不能帶來完全電子制動的優點。EHB系統的制動功能由液壓泵和電子控制閥兩者實現。在EHB系統中,制動踏板和制動器之間的液壓連線是斷開的。帶有踏板感覺模擬器和電子感測器的電子踏板模組代替了傳統的制動動作。駕駛員的需求通過‘線”傳遞到液壓單元一整合的電子控制單元(ECU)車輪制動與傳統的制動一樣。EHB系統的電子控制單元接收來自於連線制動踏板的感測器信號,正常工作情況下,備用閥關閉,控制器通過由液壓泵驅動的馬達進行制動。當控制器處於故障一安全模式的時,備用閥打開,依靠常規液壓制動系統進行制動。
EMB有諸多優點:由於制動執行器和制動踏板之間沒有了液壓和機械連線取而代之是數據線,無疑這將大大的減少制動器起作用的時間,進而有效地縮短制動距離,最佳化了穩定性;無需制動液,有利於環保;制動踏板可調,使舒適性和安全性更好;碰撞性能提高;在ABS模式下踏板無回彈振動;節省空間,零件減少;可實現所有制動和穩定功能如:ABS, EBD, TCS, ESP, BA, ACC等;可與未來的交通管理系統輕鬆聯網;可方便的集成附加功能,如電子駐車制動。同時,EMB系統目前也還有一些問題,如由於車輛外部環境的變化和磨損,引起的制動執行器效率變化不定,這就給控制帶來了困難等。
全電路制動(BBW)
在液壓制動系統的發展過程中,凱西一海斯(K-H)公司在一輛實驗車上安裝了一種電一液(EH)制動系統,徹底改變了制動器的操作機理。該系統通過採用4個比例閥和電力電子控制裝置,能進行基本制動、ABS、牽引力控制、巡航控制制動干預等情況的控制,而不需另外增加任何附加裝置。這些制動系統的革命都預示著一種完全無油液、完全的電路制動系統BBW(Brake-By-Wire)將在不久的將來成為現實。
BBW是未來制動控制系統的發展方向之一。全電制動不同於傳統的制動系統,因為其傳遞的是電,而不是液壓油或壓縮空氣,可以省略許多管路和感測器,縮短制動反應時間。全電制動的結構系統主要包括:
1)電制動器。其結構和液壓制動器基本類似,有盤式和鼓式兩種,供能裝置是電動機;
2)電制動控制單元((ECU)。接收制動踏板發出的信號,控制制動器制動;接收駐車制動信號,控制駐車制動;接收車輪感測器信號,識別車輪是否抱死、打滑等,控制車輪制動力,實現防抱死和驅動防滑。由於各種控制系統如衛星定位、導航系統,自動變速系統,無級轉向系統,懸架系統等的控制系統與制動控制系統高度集成,所以ECU還得兼顧這些系統的控制;
3)輪速感測器。準確、可靠、及時地獲得車輪的速度;
4)線束。給系統傳遞能源和電控制信號;
5)電源。為整個電制動系統提供能源。與其他系統共用。可以是各種電源,也包括再生能源。
系統的優點在於:
1)整個制動系統結構簡單,省去了傳統制動系統中的制動油箱、制動主缸、助力裝置、液壓閥、複雜的管路系統等部件,使整車質量降低;
2)制動回響時間短,制動性能提高;
3)無制動液,維護簡單;
4)系統總成製造、裝配、測試簡單快捷,易於實現模組化結構;
5)採用電線連線,系統耐久性能良好;
6)易於改進,稍加改進就可以增加各種電控制功能。
同時,還有以下問題需要解決:
1)驅動能源問題。採用全電路制動控制系統,需要較多的能源,但目前車輛12V電力系統提供不了這么大的能量,因此,車輛動力系統只有採用高壓電,加大能源供應,才可滿足制動能量要求,但高電壓同時也會帶來安全問題;
2)控制系統失效處理。全電制動控制系統面臨的一個難題是制動失效的處理。因為不存在獨立的主動備用制動系統,因此需要一個備用系統保證制動安全,在不論是ECU元件失效,感測器失效還是制動器本身、線束失效的情況下,都能保證制動的基本性能;
3)抗干擾處理。車輛在運行過程中會有各種干擾信號,如何消除這些干擾信號造成的影響,獲得最好的控制系統也是需要解決的難題之一。
目前,電制動控制系統首先在混合動力車輛中得到使用,採用液壓制動和電氣制動的聯合制動是全電制動系統的過渡方案。由於兩套制動系統共存,使結構複雜,成本偏高。
相關技術
汽車制動線控技術
汽車制動線控技術的基本思想是來自於飛機控制系統,最初的線控技術是套用于飛機控制系統的一種方法。它將駕駛員的操縱指令轉換成電信號,利用飛機上裝載的微型計算機去控制飛機的飛行狀態。這種控制方式引入到汽車制動控制上,就是將駕駛員的制動操作,經過感測器轉換成電信號,並通過一定的網路把電信號傳送給車載微型控制器去控制汽車制動的狀態。
汽車制動線控技術中的x-by-y可理解為電控方式,這裡的x就像數學函式中的自由變數,如車輪轉速模組、電子踏板壓力模組、車速儀模組等輸入型感測信號。by則代表數學函式中的算法,如ABS, ESB, EPB等汽車電子制動控制算法。Y則代表數學函式中的值域,如車輪制動模組、發動機傳動力控制模組等輸出型驅動信號。
由抗訴汽車制動線控系統所組成的網路是一種特殊的區域網路,它的使用環境與普通的區域網路不同。汽車機箱的內溫度變化很大、在行駛過程中可能出現較大的振動、發動機點火等裝置都會帶來意想不到的干擾。尤其是對於汽車轉向系統和汽車制動系統對車輛安全性的要求極高,這就要求該網路系統應具有實時性、可靠性和抗干擾能力強等特點。汽車電子制動控制就是利用其線控技術對汽車行駛過程中的各種安全問題進行合理的管理,並且由電子控制的方式實現其實時可靠的制動過程。從技術上來看,比長期使用的傳統型制動控制模式有很大的進步性。
汽車電子輔助制動控制方法
汽車電子輔助制動控制方法是利用駕駛員的制動操作進行電子輔助制動控制的方法總稱。用此方法時,需要有一個中央控制單元按照汽車制動線控技術去處理,模組控制器通過一定的網路傳送過來的信號,並根據制動算法的要求去控制相應的車輪制動模組。中央控制單元和各個模組控制器之間的空間分布設定後,通常用滿足一定要求的匯流排來作為它們之間的通信媒介。汽車電子輔助制動控制方法通常使用工作頻率為30-50Hz的車輪制動模組,這是因為車輪制動模組中制動器的機械運動速度比控制信號的處理速度慢,因而控制信號需要匹配車輪制動模組的工作頻率,同時也可以避免車輪的長期抱死狀態。另一方面,汽車電子輔助制動控制方法通常使用頻率為10Hz--10KHz的車輪轉速採集模組,這是中檔汽車在高速行駛過程中對車體狀態的一種判斷,也是汽車電子輔助制動控制的一大特點。
但是由於採用了駕駛員制動操作自身的不完善性,導致對突發情況下的制動很難保證其效果。在複雜路面的情況下,需要進行連續並即時的制動時,如果系統缺乏良好的實時性制動,將無法準確的判斷其最佳的制動點,從而不能滿足汽車制動安全的實際需求。針對這一問題,本文討論汽車電子輔助制動控制法在實時制動方面的問題,並給出了一種無需駕駛員制動操作,也能準確的判斷其最佳制動時刻的汽車電子制動控制的方法,即實時的汽車電子輔助制動控制方法。
