簡介
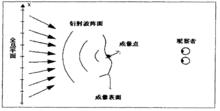
全息顯示是利用干涉原理,將物體發出的特定光波以干涉條紋的形式記錄下來,使物光波前的全部信息都存儲在記錄介質,故所記錄的干涉條紋圖樣被稱為“全息圖”。當用光波照射全息圖時,由於衍射原理能重現出原始物光波,從而形成原物體逼真的三維像,可看到立體顯示的全部特徵,並有視差效應。在不同的位置上進行觀察時,物體有顯著的位移。
把光全息顯示技術用於圖像重現通常需要兩個步驟:
一步是波前記錄,這一過程是利用光的干涉原理,將物體發出的光波以干涉條紋記錄成全息圖;
另一步是波前重現,就是用光波照射全息圖,通過光的衍射,能夠從全息圖中再現出原始物體的光波,從而形成與原物體逼真的三維圖像。
傳統的計算全息顯示
經典的計算機制全息圖實際上就是根據描述物光波與參考光波干涉原理的數學函式式,利用計算機算出干涉條紋的分布圖。一般來說,傳統的計算全息圖的產生和再現可以分為四個過程數據獲取及處理編碼產生全息圖函式全息圖的記錄全息圖的重現。下面簡單說明這幾個步驟:
(1)數據的獲取及處理:對於實際存在的物體,可利用掃瞄器或數字攝像機進行數據採集而對於實際不存在的物體,可將其函式形式直接輸入計算機。獲取數據的處理涉及到對物波信息的處理光波從物體出發到全息圖,必然經過一個傳播過程,因而到達全息圖的光場復振幅函式對應與物波函式的某種變換,因此這裡的物波信息的處理就是用指計算機完成物波函式的各種變換,不同的變換將產生不同的全息圖。
(2)編碼產生全息圖:到達全息圖的物波呈現複數形式,通常包括振幅和相位信息。全息圖的編碼技術,主要討論如何把復波陣面編碼轉化為實的非負值函式,以便記錄。主要編碼技術有下列幾種:
一種常用的方法是對光全息術的計算機仿真,即藉助參考光波與物光波的干涉來編碼,這種方式稱為干涉型編碼;方式另一種編碼方式是羅曼提出的迂迴相位法;還有一種典型的方法是提出的反向求取條紋的衍射型編碼方式;最後一種基於序列圖像的編碼方式。
(3)全息圖的記錄:由於計算全息圖通常都用光學方法實現波前再現,因而全息圖的記錄方式必須與之相適應。傳統的記錄方法是用計算機繪圖儀將計算機處理的結果直接畫在紙上,然後用照像機排制在照相底片上,適當的放大和縮小到合適的尺寸,製成實用的全息圖。對於用迂迴編碼法和干涉編碼法形成的振幅型全息圖,都可以用這種方法。空間光調製器是一種可程式控制的信息輸入和實時顯示器件,無論是輸入函式、全息圖函式、還是再現函式,都可以通過空間光調製器對雷射束的空間調製而實時的顯示出來,它的套用,改變了通過計算機控制的繪圖儀和照相縮放製作計算全息圖的傳統方法。將計算機產生的全息圖用空間光調製器的點陣單元結構進行重採樣,使得計算全息圖的信息存儲到中用於再現。
基於衍射的計算全息顯示
不同於傳統的計算全息顯示原理,空間成像小組的工作者提出了一種建立在歸一化的標量衍射基礎上的面向衍射的光柵編、解碼方法,避免了機械模擬光全息的物理過程,衍射的計算僅基於發生在全息圖像重構時的衍射,採用逆向方法求解光柵條紋。歸一化衍射的條紋不再是機械地模擬物理過程而是通過更清晰地了解衍射目的或採用合成的方法產生全息圖。
在具體的系統實現中,為了減少計算量,採用了水平視差全息顯示,即只考慮水平方向的視差而忽略垂直方向視差。假設全息圖由全息行構成,全息行由全息素、構成,每個全息素中又有不同的條紋模式。三維空間的點的光線來自於全息行中相鄰的全息素衍射的光,即三維物體可以表示成空間不同方向傳播的平面波的迭加。全息素之間的間隔為全息圖的空間採樣間隔。空間採樣間隔越小,越能反映空間圖像的細節變化,但間隔太小,則會增加數據量,加大計算複雜度。全息平面上衍射的光波可分解成一系列傳播方向不同的平面波,而這些平面波的迭加就可形成具有深度感的一圖像。如下圖示:
 全息顯示
全息顯示括來說,基於衍射的計算全息圖方法可以分為兩步:
第一步是由空間景物的三維描述計算得到全息素矢量列;
第二步就是將全息素矢量轉換為全息素,也就是全息條紋圖。
基於衍射的成像方法雖然在實現動態顯示方面有較大突破,但我們也看到,成像條件是必須形式化地描述物體的三維數據,對於無法進行形式化描述的複雜場景的三維顯示仍有局限。
數字全息顯示
面提到的全息顯示方法物體中波陣面的重現都必須由空間光調製器實現,這樣當然限制了全息技術的套用和推廣。近年來,又出現了另一種非真三維顯示的全息顯示的重現方法一一數字全息重現。數字全息最早由顧德門提出,數字全息重構的一般方法是利用電荷禍合器件獲得干涉全息圖後,模擬生成參考光,利用計算機技術和相關算法對全息圖進行處理,恢復物體的振幅和相位信息,然後在計算機上重建物體的三維模型,而無須相干光解調。其記錄光路經典的光全息完全相同,不同的是利用電荷禍合器件代替普通照相干板來記錄物光波與參考光波的干涉條紋,並將所記錄的信息存入計算機,然後用數字計算的方法對物光波的復振幅進行重構,以研究重現光波場的振幅相位性質。
由於以上特點,數字全息重構可為不具備光學設備的其他領域所接受,並能離開光學實驗室看到記錄的物體的三維信息。數字全息重構可以直接得到被記錄物體再現像的復振幅分布,從而獲得被記錄物體的表面亮度和形貌分布另外,數字全息中用光敏電子元件如攝像機來作為記錄介質,比傳統的銀鹽乾板記錄所需的曝光時間短,且目前數字全息系統可以達到小於微米的橫向解析度和納米量級的縱向解析度,因此能夠用來清晰的記錄運動物體的瞬時狀態,而且沒有化學處理過程,記錄和再現過程都比經典光全息方法更快捷,具有較廣泛的套用前景。
數字全息顯示一般分為兩步,首先從全息圖中恢復物波波陣面,然後再利用計算機計算傳播後的光場分布,重構原始三維物體。由於波陣面的記錄仍主要是通過干涉方法獲取,因而從干涉全息圖中恢復波陣面,重構三維物體具有普遍意義。
全息顯示的新方法
經典的光學生成全息圖方法由於其固有的局限性無法滿足動態全息顯示要求,在全息圖的獲取方面希望由計算機來處理全息圖,此方法比較方便、靈活並且能藉助先進的光電技術。於是研究者們開始致力於計算全息圖的研究,近幾十年來出現許多全息圖計算方法的研究。
傅立葉全息術
在研究和實踐中,最廣泛使用的計算機產生全息圖方法來自傅立葉全息術。該領域採用各種近似來把全息圖平面上接受到的光波表示成物體發射的光波的傅立葉變換,這樣表示使得計算能用快速傅立葉變換來執行,減少計算時間。傅立葉全息術中主要包括菲涅耳全息圖和夫琅和費全息圖傅立葉變換全息圖。
 全息顯示
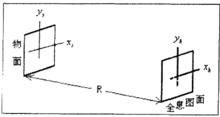
全息顯示最早的計算機產生全息圖是夫琅和費全息圖,夫琅和費全息圖是將物體放在離全息膠片非常遠的距離上產生的。具體說,假定我們的景物是由與軸垂直的單個平面物體組成,如下圖所示:
對於典型的菲涅耳全息圖,要求至少米。這個值雖然也相當大,但比夫琅和費全息圖需要兩公里就大大減小了。對於不同深度的若干物體,可以把景物劃分為不同深度上的若干平面,把菲涅耳近似計算公式套用於每一個這樣的平面,並把結果疊加起來得到完整的全息圖。
分數傅立葉全息術
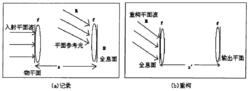
分數傅立葉變換全息圖是物體任意分數階傅立葉頻譜與平面參考光波在其公共區域內進行相位比較的結果,在分數傅立葉變換域上用全息的方法記錄下的物光波的分數傅立葉變換分布,分數傅立葉全息圖是目前全息術發展的又一個重要方向。採取雙透鏡裝置記錄分數傅立葉變換全息圖。下圖給出了分數傅立葉變換全息圖的記錄和重現光路。
 全息顯示
全息顯示基於圖像的全息圖計算方法
在全息干涉編碼算法中,我們利用參考光將物波的相位信息保存到記錄材料中並重現出來,而在沒有參考光干涉的條件下,通過攝像機在白光下獲得的投影得到一系列離散的透視圖像,經過一些計算處理合成全息條紋圖的方法也是目前研究的熱點問題。
這種基於圖像的全息圖生成方法,把一個景物的連續的維表面信息轉換為相對少量的維圖像信息,其結果就是把一個連續的波陣面問題多視點問題變成一個多視圖問題,這樣不僅極大地減少了計算量,還可以充分利用計算機視覺和圖形學中的多視圖幾何原理及基於圖像的繪製方法,降低計算的複雜性並實現複雜景物的維描述和顯示。這種基於圖像的全息圖技術能夠用相對少量的圖像來逼近連續的信息。
