
位置隨動系統的組成
位置隨動系統可以是開環控制系統,如步進電動機控制系統。以前開環控制精度較低,如今已有精度相當高(10000步/r以上)的步進隨動系統。
在跟隨精度要求較高而且驅動力矩又較大的場合,多採用閉環控制系統,驅動電動機採用直流伺服電動機、兩相感應交流伺服電動機或三相永磁同步伺服電動機等。
位置隨動系統閉環結構一般採用三重閉環的形式,即位置環、速度環和電流環。從運動控制的基本規律來理解,這樣的三閉環結構是最合理的。構想一個關於時間的位置函式P(t),以其作為位置給定信號,通過位置環可以控制電動機的實際位置;與此同時,以P(t)的導數為給定信號,通過速度環可以控制電動機的實際速度;也在此同時,由於電動機的電流一般與轉矩成正比,而轉矩又是與加速度成正比的,因此通過電流環可以控制電動機的實際加速度。這樣,位置、速度、加速度都能通過位置隨動系統得到有效的控制。現以數控工具機伺服系統為例,研究位置隨動系統的基本結構。
數控工具機伺服系統包括機械執行機構和電氣自動控制兩個組成部分。數控工具機一般需要多軸聯動,可以採用運動控制卡在上位機控制下協調工作。每根軸的運動控制系統可分為半閉環位置伺服系統、全閉環位置伺服系統兩種基本結構。這兩類結構的根本區別在於位置檢測元件不同,位置檢測元件的安裝位置也不同。
半閉環位置伺服系統框圖如下圖所示。半閉環結構的位置伺服系統以伺服電動機軸的轉角位移為被控量,採用旋轉編碼器(也可以用旋轉變壓器)作為位置檢測元件。下圖中,電流反饋部分沒有畫出。半閉環結構是當前套用最為廣泛的結構,由於它的電氣自動控制部分與機械部分相對獨立,可以對驅動器進行通用化設計。
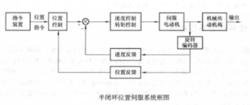 半閉環位置伺服系統框圖
半閉環位置伺服系統框圖全閉環結構的位置伺服系統以工作檯的平動位移為被控量,採用光柵尺(也可用感應同步器)作為位置檢測元件。全閉環結構在一些大型機械設備和超精密機械設備中得到套用。由於全閉環位置伺服系統將機械傳動機構也包括到了位置控制迴路中,就使得機械傳動結構的誤差也可以通過閉環控制得到減小,但同時也增大了位置閉環整定的難度。全閉環位置伺服系統框圖如下圖所示。
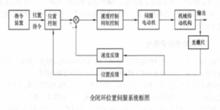 全閉環位置伺服系統框圖
全閉環位置伺服系統框圖位置隨動系統的特點
位置隨動系統與調速系統相比較有以下特點:
(1)輸出量(被控量)為位移,而不是轉速。
(2)輸入量是不斷變化的(而不是恆定量),系統主要要求輸出量能按一定精度跟隨輸入量的變化,以跟隨性能為主。而調速系統主要要求輸出量保持恆定,能抑制負載擾動對轉速的影響,以抗擾性能為主。
(3)功率放大器及控制系統都必須是可逆的,使伺服電動機可以正、反兩個方向轉動,並消除正或負的位置偏差。而調速系統可以有不可逆系統。
(4)位置隨動系統的外環為位置環,而速度環、電流環為內環 。
位置隨動系統的基本性能指標
位置隨動系統的性能指標,可以分為動態和穩態兩個方面。其動態性能基本上是由內環來保證的,而穩態精度則主要靠外環來實現。對位置隨動系統總的要求是穩定性好、精度高、動態回響快、抗擾動能力強。對於內環的要求是,希望有足夠的調速範圍,快且平穩的起、制動性能,轉速儘量不受負載變化、電源電壓波動及環境溫度等於擾因素的影響。而對外環的要求是,有足夠的位置控制精度(定位精度)和位置跟蹤精度(位置跟蹤誤差),有足夠快的跟蹤速度、位置保持能力(伺服剛度)等。
應當說明,作為位置隨動系統的速度內環,相對於一般的調速系統而言,性能要求嚴格得多。這是因為位置隨動系統運行時要求能以一定的精度隨時跟蹤指令的變化,因而伺服電動機的運行速度常常是不斷變化的,有時速度的變化是很快的,速度內環必須有足夠的頻寬才能跟蹤這樣的快速變化。以數控工具機為例,數控系統中最常見的插補形式有兩種:一是直線插補;二是圓弧插補。如果不考慮升降速的問題,那么在直線插補的情況下,位置指令是關於時間的斜坡函式;而在圓弧插補的情況下,位置指令是關於時間的正餘弦函式。一個位置伺服系統,僅當它的指令信號呈斜坡函式形式,即每單位時間移動的距離或轉過的角度相等時,其運行與控制特性才與一個普通調速系統相似。在數控加工中,經常有一些尖角過渡的場合,在這種情況下要求伺服電動機的速度很快改變,而且不應當過沖和振盪,否則就會產生過切。
一般來說,位置隨動系統性能的好壞,可以用下述指標衡量。
(1)穩態位置跟隨誤差:當位置隨動系統對輸入指令信號的瞬態回響過程結束後,在穩定運行時,位置的指令值與實際值之間的誤差被定義為系統的穩態位置跟隨誤差。
位置隨動系統的跟蹤誤差不僅與系統本身的結構有關,還取決於系統輸入指令的形式。因此,為了評價一個位置隨動系統的跟蹤性能,必須根據它的套用場合確定一種標準的輸入指令信號形式。對於數控工具機中的位置伺服系統,典型的輸入指令信號形式是斜坡輸入函式和正餘弦輸入函式。在工程中,也常使用伺服滯後時間的概念,其伺服滯後時間與穩態跟隨誤差所表達的都是位置隨動系統對輸入給定信號的穩態跟隨情況。
(2)定位精度與速度控制範圍:定位精度是評價位置隨動系統控制準確度的性能指標。系統最終定位點與指令目標值間的靜止誤差定義為系統的定位精度。
位置伺服系統應當能對位置輸入指令輸入的最小設定單位(1脈衝當量)做出相應的回響。為了實現這一目標,一是要採用解析度足夠高的位置檢測器,二是要求系統的速度單元具有足夠寬的調速範圍,也就是說速度單元要有較好的低速運行性能。
 位置隨動系統 位置隨動系統
位置隨動系統 位置隨動系統 位置隨動系統 位置隨動系統
位置隨動系統 位置隨動系統 位置隨動系統
位置隨動系統下圖所示為速度控制單元的輸入/輸出特性。在圖中可見存在控制死區,當速度指令落入死區範圍內時,伺服電動機將處於不轉動或不穩定狀態。而速度控制單元的最高運行速度則由電動機的最高轉速或額定轉速限定,速度達到最高即進入飽和區。在位置隨動系統中,速度指令是與位置跟隨誤差成正比的,故在圖中用位置誤差代替速度指令作為橫坐標的變數。速度指令的死區對應著位置跟隨誤差的死區,越小,說明速度控制單元的低速性能越好。系統在靜止狀態收到相當於1個脈衝的輸入指令時,為使位置伺服機構移動,指令必須大於。如果設對應系統最高速度的位置誤差是。,則要求速度控制單元的調速範圍D應當達到:
 位置隨動系統
位置隨動系統 速度控制單元的輸入/輸出特性
速度控制單元的輸入/輸出特性 位置隨動系統
位置隨動系統 位置隨動系統 位置隨動系統
位置隨動系統 位置隨動系統(3)最大快移速度:系統速度控制單元所能提供的最高速度,是決定系統定位精度的一個重要參數。設速度控制單元的放大倍數為,位置放大器的放大倍數為,則對應於最大快移速度的位置誤差就是前面提到的,根據上式,系統的最小解析度為:
 位置隨動系統
位置隨動系統 位置隨動系統
位置隨動系統 位置隨動系統
位置隨動系統(4)伺服剛度:表達的是伺服系統抵抗負載外力,在原來的位置保持靜止的能力。設伺服電動機的轉子軸原來靜止,後來在外加的轉矩的作用下發生了角位移,那么伺服剛度定義為:
 位置隨動系統
位置隨動系統伺服剛度取決於位置環的增益,也取決於速度控制單元的低速力矩性能 。
