
基本思想
主動視覺的主要思想,是根據視覺感知任務的要求或外部刺激,系統主動地改變感測器(攝像機)的內部參數(焦點、焦距、光圈、聚散度等)及外部參數(位置、方向、光源條件等),以達到簡化視覺計算,消除景物解釋的歧義性,實現實時感知的目的。主動視覺的機理更接近人的視覺系統,例如人在觀察時,要不斷地轉動眼球,甚至轉動頭部或移動身體的位置,以調整視線和注意點。
傳統的計算機視覺理論(以著名學者馬爾(D.Mar)為代表),把視覺過程看成一個信息處理的過程,側重於研究如何從景物的二維圖像,通過由低到高的分層表示和模組化的視覺計算,最終獲得三維景物的精確幾何描述和景物中物體性質的定量描述。由於三維景物的成像過程非常複雜,景物中物體的幾何形狀、表面反射特性,以及光源、物體與攝像機間的空間關係等諸多因素都將對二維圖像中像元的灰度值產生影響;另外,成像過程中還會引入噪聲、畸變以及遮擋等問題。因此作為成像過程的逆過程,從原始的二維圖像獲取三維景物精確的描述是非常困難的任務。
主動視覺系統
構成方式
主動視覺通過控制視覺系統中的攝像機進行運動和調整相關參數,改變攝像機的位置和方向 (位姿),實現對目標的跟蹤,構成主動視覺系統的主要方式有:
1、將攝像機放置於可以在水平和垂直方向旋轉的雲台上,通過控制雲台的轉動實現攝像機方向的改變。
2、使用主動攝像機使攝像機完成水平和垂直方向上一定幅度的旋轉,也可以對攝像機的焦距進行調整。
3、通過模仿人類眼睛的構成方式,設計主動視覺系統平台,通過平台上相應的電機驅動攝像機在水平和垂直及左、右方向上轉動,此類系統一般都是模仿人類的雙目 “頭—眼”系統,基本的運動方式相同,只是在雙目構成、轉動控制機構和控制精度上有所區別。
工作過程
 主動視覺
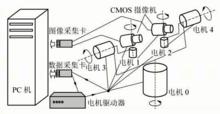
主動視覺雙目主動視覺系統是智慧型機器人的一部分,一般該系統由一台高性能PC機、兩台CCD或者CMOS攝像機、5台直流伺服電機、一塊PCI接口的高速雙通道圖像採集卡、一塊PCI接口的數據採集卡、電機驅動電路 (包含電源)組成,如右圖所示,該雙目主動視覺系統共有5個自由度,可以模仿人的雙眼運動,也即左、右攝像機(相當於人的兩個眼球)可以上、下、左、右運動,同時整個系統可以像人的頸一樣作旋轉運動。
1、圖像採集部分選擇兩台CMOS彩色攝像機,CMOS具有低功耗、高靈敏度、低噪點、高集成度、高動態範圍、高數據讀取和處理等優點,在固體圖像感測器中得到了越來越廣泛的使用.隨著CMOS(互補金屬氧化半導體)製造工藝的不斷發展,CMOS攝像機獲取的圖像質量也在不斷提高,已經成為CCD (電荷耦合器件)攝像機之外的一種很好的選擇.圖像採集卡將模擬視頻信號濾波並且完成A/D轉換後,直接通過PCI匯流排傳入PC機記憶體,傳送速度高,實時性好。
2、數據採集部分選擇數據採集卡,用於將PC機計算出來的控制量輸出到伺服放大器驅動電機,同時將編碼器的反饋信號輸入到PC機,數據採集卡採用PCI匯流排,可以直接插在PC機內的任一個PCI插槽中,構成數據採集和處理系統。PCI板上一般裝有100kHz、12bit的A/D轉換器和D/A轉換器,提供了8雙/16單的模擬量輸入通道和2路模擬量輸出通道;支持軟體查詢方式、中斷方式,兩種方式的傳輸率均可達到100kbps;PCI匯流排寬度為32bit,同步工作頻率可達到33MHz,最高傳輸速率為132Mbps.
3、所有計算均在一台PC機上完成。
4、直流伺服電機要有體積小、高速、噪音極低、帶光電脈衝發生器的特點,用於控制視覺系統的5個自由度。
在視覺系統中,攝像機不斷地獲取外部環境的圖像,通過圖像採集卡輸入PC機中,視覺模組 (目標檢測與跟蹤)對圖像進行處理得到運動目標的位置等信息,並且傳送給主動視覺系統的運動控制機構,控制命令通過數據卡、電機驅動電路控制視覺系統的電機驅動攝像機轉動,將目標保持在攝像機圖像平面的中央,從而實現閉環視覺跟蹤控制。目標檢測與跟蹤是低層視覺功能,目標識別屬於高層視覺功能.跟蹤的目標保持在圖像平面的中央位置,使得到的感興趣圖像最清晰,為識別打下良好的基礎.檢測與跟蹤、識別程式是在兩個獨立的執行緒中完成的,兩個執行緒之間存在著協調關係,多執行緒系統模式使得在跟蹤的同時也可以進行識別,視覺系統採用動態look-and-move視覺伺服工作方式,即圖像處理和系統控制可以同時進行,從而保證了系統的動態性能。
