
研究背景
基於先進制造技術的厘米級微型渦輪噴氣發動機(Micro Turbo Engine,MTE),是滿足將來微型飛行器對高能量儲存密度、高功率重量比的動力裝置需求的有效方案,也可以作為將來的野戰攜帶型能源。由於MTE的尺寸比常規發動機尺寸縮小許多,從氣動熱力循環、燃燒、轉子、渦輪、壓氣機、軸承等許多方而都而臨了新的問題。因此必須進行一系列的實驗,從而為微型渦噴發動機的研製提供充足的實驗數據。如發動機各個部分內的流體的壓力和流速的測量實驗等。為了能方便測量出流體的壓力、流速等數據,必須使測量探針能夠在X、Y、Z三個方向實現精確移動,而且能使探針到達指定的空間位置,所以將探針通過支架安裝在能夠實現X、Y、Z三向移動的平台上。在要求探針支架具有足夠剛度的同時要求此移動平台具有足夠的移動解析度和較高的移動精度。
平台結構
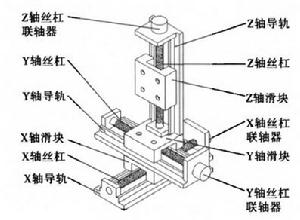
XYZ平台主要包括X軸移動部分,Y軸移動部分,Z軸移動部分。其結構如圖所示。各軸的聯軸器可用於連線伺服電機,實現自動調節,也可以直接和旋轉圓盤連線實現手動調節。
 XYZ平台
XYZ平台整體設計
三坐標精密移動平台的X、Y、Z三個方向的部件具有相同結構,都包括各自的傳動系統、導向系統、驅動系統、基於容柵感測器的數顯位移測量系統以及相應的支撐部件。
平台在X、Y、Z三個方向的結構安排採用下述方案,即以X向的底板固定在基座上,Y向的底板固定在X向的移動拖板上,Z向的底板通過角鐵與Y向的拖板固定。測量探針可以通過支架安裝在2向的拖板上,由Z向的拖板的上下運動實現探針曠Z向移動。整個Z向的部件安裝在Y向的拖板上,所以Y向的拖板能夠實現探針的Y向移動。同樣,平台也能夠實現探針的X向移動。
考慮到微流體測量移動平台必須能夠實現X、Y、Z三個方向特別是Z向傳動的自鎖,而且移動平台並不是非常頻繁地使用以及成本因素,三坐標精密移動平台的傳動系統採用滑動絲桿副實現傳動。滑動絲桿副結構簡單,成本低,無需潤滑系統而且具有自鎖性能。X、Y、Z三個方向的螺旋傳動中,以X方向的螺旋傳動所需的力最大,通過移動平台傳動時傳導力的計算,X方向採用M10的滑動絲桿副實現傳動,以滿足螺旋傳動時的軸向和徑向剛度。考慮到製造加工的方便和成本,X、Y、Z三個方向的螺旋傳動尺寸都採用M10的滑動絲桿副。
套用
方傑等 通過利用尋邊器和XYZ平台進行同軸度測量和調節,電主軸和測功機之間的同軸度能達到0.02mm以內,達到了聯軸器、電主軸、測功機正常運行的同軸度要求。
在實際的測量過程中,很好地避免了千分表重力對同軸度測量結果的影響,使實測值能反映電主軸和測功機真實的同軸度。由於藉助第三方基準—XYZ平台,很好地避免由於被測軸和基準軸軸徑比較小,軸階多,軸階較短,導致千分表的磁力表座很難平穩地吸附在基準軸上的情況。由於XYZ平台每軸的有效行程較大,數字式三維工件尋邊器有很高的測量精度和顯示精度,該同軸度測量和調節方法能很好地測量電主軸和測功機輸出軸軸線夾角,使同軸度的調節工作變得簡單。
該同軸度測量方法的不足之處:在實際測量過程中,藉助了第三方基準,XYZ平台精度在很大程度上影響同軸的測量結果,所以要選用高精度的XYZ平台。
