
LIDAR簡介
LIDAR(雷射雷達)即Light Detection And Ranging,大致分為機載和地面兩大類,其中機載雷射雷達是一種安裝在飛機上的機載雷射探測和測距系統,可以量測地面物體的三維坐標。機載LIDAR是一種主動式對地觀測系統,是九十年代初首先由西方國家發展起來並投入商業化套用的一門新興技術。它集成雷射測距技術、計算機技術、慣性測量單元(IMU) /DGPS差分定位技術於一體,該技術在三維空間信息的實時獲取方面產生了重大突破,為獲取高時空解析度地球空間信息提供了一種全新的技術手段。它具有自動化程度高、受天氣影響小、數據生產周期短、精度高等特點。機載LIDAR感測器發射的雷射脈衝能部分地穿透樹林遮擋,直接獲取高精度三維地表地形數據。機載LIDAR數據經過相關軟體數據處理後,可以生成高精度的數字地面模型DTM、等高線圖,具有傳統攝影測量和地面常規測量技術無法取代的優越性,因此引起了測繪界的濃厚興趣。機載雷射雷達技術的商業化套用,使航測製圖如生成DEM、等高線和地物要素的自動提取更加便捷,其地面數據通過軟體處理很容易合併到各種數字圖中。
機載LIDAR技術在國外的發展和套用已有十幾年的歷史,但是我國在這方面的研究和套用還只是剛剛起步,其中利用航空雷射掃描探測數據進行困難地區DEM、DOM、DLG數據產品生產是當今的研究熱點之一。該技術在地形測繪、環境檢測、三維城市建模等諸多領域具有廣闊的發展前景和套用需求,有可能為測繪行業帶來一場新的技術革命。
針對不同的套用領域及成果要求,結合靈活的搭載方式,LiDAR技術可以廣泛套用於基礎測繪、道路工程、電力電網、水利、石油管線、海岸線及海島礁、數字城市等領域,提供高精度、大比例尺(1:500至1:10000)的空間數據成果。
 雷射雷達的使用
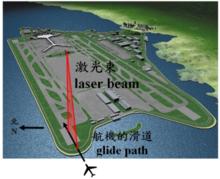
雷射雷達的使用下圖為雷射雷達的雷射束掃瞄機場的滑道,探測飛機將遇到的風切變,即逆風的改變。
工作原理
 Lidar
Lidar感測器發射雷射束並經空氣傳播到地面或物體表面,再經表面反射,反射能量被感測器接收並記錄為一個電信號。如果將發射時刻和接收時刻的時間精確記錄,那么雷射器至地面或者物體表面的距離(R)就可以通過以下公式計算出來 R=ct/2,c:光速,t:發射時刻和接受時刻的差。
光脈衝以光速傳播, 由雷射發射器發射一束離散的光脈衝,打在地表並反射,接收器總會在下一個光脈衝發出之前,收到一個被反射回來的光脈衝,通過記錄瞬時紅外線雷射射到目標的時間從而測出距離。
當代雷射雷達一般將發射和接收光路設計為同一光路。
雷射掃描設備裝置可記錄一個單發射脈衝返回的首回波﹑中間多個回波與最後回波,通過對每個回波時刻記錄,可同時獲得多個高程信息,將IMU/DGPS系統和雷射掃描技術進行集成,飛機向前飛行時,掃瞄器橫向對地面發射連續的雷射束,同時接受地面反射回波,IMU/DGPS系統記錄每一個雷射發射點的瞬間空間位置和姿態,從而可計算得到雷射反射點的空間位置。
系統原理
系統組成
機載L IDAR 系統主要包括:1) 動態差分GPS接收機,用於確定掃描投影中心的空間位置;2) 姿態測量裝置( IMU) ,用於測量掃描裝置主光軸的空間姿態參數;3) 雷射掃描測距系統,用於測量感測器到地麵點的距離;4) 一套成像裝置(主要是數位相機) ,用於獲取對應地面的彩色數碼影像,用於最終製作正射影像。
雷射掃描測距系統原理
無線電波、X 光、可見光、紅外光等都是電磁波。在雷達中,由發射機發出的無線電波射到空中後,一部分經物體或空氣反射後,由雷達的接收器系統組成接收,這部分反射波稱為雷達信號,反映從反射無線電波的物體到雷達的距離。雷射雷達使用的是由雷射器發射的紅外線,或可見光,或紫外光。雷射測距的基本原理是利用光在空氣中的傳播速度,測定光波在被測距離上往返傳播的時間來求得距離值。設光波在某一段距離上往返傳播時間為t ,待測定距離可表示為D =1/2ct , (1)式中, c 為光波在真空中的傳播速度,約為300 000km/s。只要精確地求出時間就可以求出距離D 。
具體實現方法有脈衝法、相位法和變頻法,常用的是脈衝法和相位法。相位法通過量測連續波(continuous wave ,CW) 信號的相位差間接確定傳播時間;脈衝法直接量測脈衝信號傳播時間。如果物體的表面高低不平,在地面使用三維雷射掃瞄器,可獲得反射物體的表面形貌圖;使用機載雷射雷達系統,可以獲取高精度的數字等高圖。
雷射掃描方式
一束雷射脈衝一次回波只能獲得航線下方的一條掃描線上的回波信息,為了獲取一系列雷射腳點的距離信息,需採用一定的掃描方式進行作業。常用的掃描方式有:線掃描、圓錐掃描、纖維光學陣列掃描等。
1) 線掃描方式:通過擺動式掃描鏡和旋轉式掃描鏡實現,包括平行線形和“Z”字形兩種。
2) 圓錐掃描方式:通過傾斜掃描鏡實現,掃描鏡的鏡面具有一定傾角,旋轉軸與發射裝置的雷射束
成45°夾角,隨載體的運動光斑在地面上形成一系列有重疊的橢圓。
3) 纖維光學陣列掃描方式:光纖沿一條直線排列,光斑在地面上形成平行或“Z”形掃描線。
部件組成
1)雷射測量裝置。它的數據發射量和功率非常大, 每秒最多可發射12. 5萬個雷射點, 測量距離為離地面30-2500m。測量到地面的雷射點密度最高可達65個/m2, 正常飛行高度情況下(航高800m),在植被比較茂密的地區也有一定量的雷射點射到地面上。可利用專業軟體對數據進行處理辨別出地麵點或是植被點等。
2)GPS接收機。通過接收衛星的數據,實時精確測定出設備的空間位置,再通過後處理技術與地面基站進行差分計算,精確求得飛行軌跡。
3)慣性測量裝置(IMU)。由裝置將接收到的GPS數據, 經過處理, 求得飛行運動的軌跡, 根據軌跡的幾何關係及變數參數, 推算出未來的空中位置,從而測算出該測量系統的實時和將來的空間向量。由於在飛行過程中,飛機會受到一些外界因素的影響,此時,實際軌跡由慣導裝置測定,通過動力裝置調整,使飛行精確按原軌跡運動,所以該系統也稱作為慣導系統。
4)數位相機。採用高解析度數位相機(2200萬像素),在1000m的飛行高度,影像地面分辨可達到250px,可以獲得高清晰的影像。通過影像與雷射點數據整合處理後,可以得到依比例、帶坐標和高程的正射影像圖。在不同航高下,可以按需要得到1:250-1:10000不同比例尺的正射影像。
5)其他相關設備。其他相關裝備有飛機、計算機、專業數據處理軟體等。
