簡介
晶片內的PWM斬波器電路可開關模式下調節步進電機繞組中的電機繞組中的電流。該積體電路採用了SGS公司的模擬/數字兼容的I2L技術,使用5V的電源電壓,全部信號的連線都與TFL/CMOS或集電極開路的電晶體兼容。L297的晶片引腳特別緊湊,採用雙列直插20腳塑封封裝,其引
腳見圖1,內部方框見圖2。

 內部電路圖
內部電路圖原理
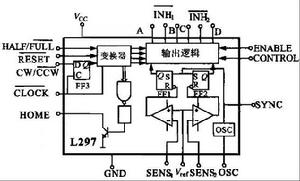
在圖2所示的L297的內部方框圖中。變換器是一個重要組成部分。變換器由一個三倍計算器加某些組合邏輯電路組成,產生一個基本的八格雷碼(順序如圖3所示)。由變換器產生4個輸出信號送給後面的輸出邏輯部分,輸出邏輯提供禁止和斬波器功能所需的相序。為了獲得電動機良好的速度和轉矩特性,相序信號是通過2個PWM斬波器控制電動波器包含有一個比較器、一個觸發器和一個外部檢測電阻,如圖4所示,晶片內部的通用振盪器提供斬波頻率脈衝。每個斬波器的觸發器由振盪器的脈衝調節,當負載電流提高時檢測電阻上的電壓相對提高,當電壓達到Uref時(Uref是根據峰值負載電流而定的),將觸發器重置,切斷輸出,直至第二個振盪脈衝到來、此線路的輸出(即觸發器Q輸出)是一恆定速率的PWM信號,L297的CONTROL端的輸入決定斬波器對相位線A,B,C,D或抑制線INH1和INH2起作用。CONTROL為高電平時,對A,B,C,D有抑制作用;為低電平時,則對抑制線INH1和INH2有抑制作用,從而可對電動機和轉矩進行控制。
1腳(SYNG)——斬波器輸出端。如多個297同步控制,所有的SYNC端都要連在一起,共用一套振盪元件。如果使用外部時鐘源,則時鐘信號接到此引腳上。
2腳(GND)——接地端。
3腳(HOME)——集電極開路輸出端。當L297在初始狀態(ABCD=0101)時,此端有指示。當此引腳有效時,電晶體開路。
4腳(A)——A相驅動信號。
5腳(INH1)——控制A相和B相的驅動極。當此引腳為低電平時,A相、B相驅動控制被禁止;當線圈級斷電時,雙極性橋用這個信號使負載電源快速衰減。若CONTROL端輸入是低電平時,用斬波器調節負載電流。
6腳(B)——B相驅動信號。
7腳(C)——C相驅動信號。
8腳(INH2)——控制C相和D相的驅動級。作用同INH1相同。
9腳(D)——D相驅動信號。
10腳(ENABLE)——L297的使能輸入端。當它為低電平時,INH1,INH2,A,B,C,D都為低電平。當系統被復位時用來阻止電機驅動。
11腳(CONTROL)——斬波器功能控制端。低電平時使INH1和INH2起作用,高電平時使A,B,C,D起作用。
12腳(Vcc)——+5V電源輸入端。
13腳(SENS2)——C相、D相繞組電流檢測電壓反饋輸入端。
14腳(SENS1)——A相、B相繞組電流檢測電壓反饋輸入端。
15腳(Vref )——斬波器基準電壓輸入端。加到此引腳的電壓決定繞組電流的峰值。
16腳(OSC)——斬波器頻率輸入端。一個RC網路接至此引角以決定斬波器頻率,在多個L297同步工作時其中一個接到RC網路,其餘的此引角接地,各個器件的腳 I (SYNC)應連線到一起這樣可雜波的引入問題如圖5所示。
17腳(CW/CCW)—方向控制端。步進電機實際鏇轉方向由繞組的連線方法決定。當改變此引腳 的電平狀態時,步進電機反向鏇轉。
19腳(HALF/FULL)——半步、全步方式 選擇端。此引腳輸入高電平時為半步方式(四相八拍),低電平時為全步方式。如選擇全步方式時變換器在奇數狀態,會得到單相工作方式(單四拍)。
20腳(RESET)——復位輸入端。此引腳輸入負脈衝時,變換器恢復初始狀態 (ABCD=0101)。
L297驅動相序的產生
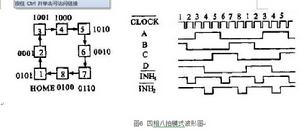
L297能產生單四拍、雙四拍和四相八拍工作所需的適當相序。3種方式的驅動相序都可以很容易地根據變換器輸出的格雷碼的順序產生,格雷碼的順序直接與四八拍(半步方式)相符合 ,只要在腳19輸入一高電平即可得到。其波形圖如圖6所示。
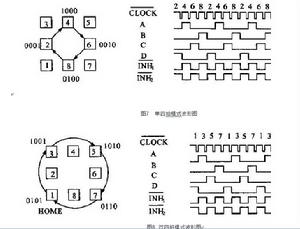
通過交替跳過在八步順序中的狀態就可以得到全步工作方式,此時需在腳19接一低電平,前已述及根據變換器的狀態可得到四拍或雙四拍2種工作模式,如圖7,8所示。
