
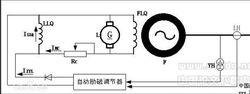
工作原理
下圖為自並勵勵磁系統的原理接線圖。發電機勵磁功率取自發電機端,經過勵磁變壓器LB降壓,可控矽整流器KZL整流後給發電機勵磁。自動勵磁調節器根據裝在發電機出口的電壓互感器TV和電流互感器TA採集的電壓、電流信號以及其它輸入信號,按事先確定的調節準則控制觸發三相全控整流橋可控矽的移相脈衝,從而調節發電機的勵磁電流,使得在單機運行時實現自動穩壓,在併網時實現自動調節無功功率,提高電力系統的穩定性。
發電機的線電壓UAC和相電流IB分別經電壓互感器和電流互感器變送後,經鑒相電路產生電壓周期的方波脈衝和電壓電流相位差的方波脈衝信號送PIC16F877微控制器,用PIC的計數器測量這兩脈衝的寬度,便可得到相位差計數值,即電網的功率因素角。然後通過查表得出相應的功率因素,進一步求出有功功率和無功功率。
控制單元選用一片PIC16F877單片機,因PIC16F877單片機內部有A/D轉換功能,從而不用外部A/D模組,這樣減少了外部器件,降低了成本,增強了抗干擾能力。PIC單片機根據從輸入通道採集的發電機運行狀態變數的實時數據,進行控制計算和邏輯判斷,求得控制量。在可控矽整流電路中,要求控制電路按照交流電源的相位向可控矽控制極輸出一系列的脈衝,才能實現可控矽順利導通和自然換相。同步和數字觸發控制電路的作用就是將計算機CPU計算出來的、用數字量表示的可控矽控制角轉換為觸發脈衝。由功率放大電路將觸發脈衝放大後去觸發可控矽,從而控制勵磁電流。
 勵磁系統
勵磁系統對於他勵電動機,勵磁電壓是加在定子上的電壓,電樞電壓是加在轉子上的電壓,電機出廠後,釘子與轉子的電阻是一定的,在啟動電機時,勵磁電流先給定一固定值,隨著轉速,轉矩的增加電樞電流逐漸的增加以滿足負載的要求。在合適的勵磁的作用下,會有滿足要求的電樞電流使電機正常運轉 。
模組組成
CPU控制
CPU控制模組是勵磁調節器的控制核心,採用美國Microchip公司生產的PIC16F877單片機。PIC16F877具有獨特的RISC(精簡指令集) 結構,數據匯流排和指令匯流排分離的哈佛匯流排結構,使指令只有單字長的特性,且允許指令碼的位數可多於8 位的數據位數,這與傳統的採用CISC 結構的8 位單片機相比,可以達到2∶1 的代碼壓縮,速度提高4 倍。PIC16F877內部帶有8路10位A/ D 轉換器,8KХ14位FLASH程式存儲器,368Х8位RAM,256Х8位的EEPROM,14箇中斷源和3個定時/ 計數器,片內集成多達15個外圍設備模組。此外,還有低功耗睡眠模式和片內看門狗電路,易於實現低功耗設計和抗干擾設計。
勵磁電流數據採集
PIC單片機勵磁調節器採集反映發電機運行工況的4個模擬信號,即發電機機端電壓UAC和定子電流IB,勵磁電壓UL和勵磁電流IL。這4個模擬信號經過整形濾波後,分別送入對應的4片採樣保持器LF398,採樣保持器在PIC16F877微控制器RE1腳產生的同步控制信號下,完成4路信號同步採樣,將此4路被測信號分別接入RA0、RA1、RA2、RA3 4個10位A/D連線埠引腳。模擬輸入的模擬參考電壓可以在暫存器中設定。PIC16F877的A/D轉換結果儲存在兩個8位的暫存器ADRESH和ADRESL中。由於PIC的A/D模組是電壓輸入的,所以在迴路輸入中,電壓信號可以直接輸入,而電流信號要在輸入處接一適當電阻,將其轉換成電壓後再輸入。當A/D模組的輸入中有輸入電壓超過它的最高輸入電壓5V時,就可能損壞器件。因此,在A/D輸入端接上對地5V的穩壓管,這樣,當有高於最高允許電壓的輸入電壓出現時,利用穩壓管可以把它穩定在正常的範圍之內。
開、停機,起、停勵,手、自動,增、減功率等開關量通過光電隔離後與PIC16F877的連線埠B相連。
勵磁電流顯示
為了節約引腳,利用PIC16F877單片機強大的I/O擴展功能,採用MSSP模組的SPI方式和移位暫存器晶片74HC595實現數碼管的靜態顯示。
勵磁電流通信
絕大多數勵磁系統與上位機的通信採用RS-485。RS-485是一種半雙工的通信協定,只能構成主從式結構的通信網路,通信聯絡方式為命令型。這種機制使得在構建大型複雜工業現場的實時測控網路時存在不足。CAN匯流排具有點對點、一點對多點、全局廣播傳送數據等功能,以及可靠性高、抗電磁干擾能力強、傳輸速率快、通信距離較遠、易於使用和維護、便於網路擴張等優點,並考慮到勵磁系統是在強電磁干擾環境中使用,所以本系統使用CAN匯流排通信。PIC16F877晶片沒有集成CAN功能模組,但可以通過其SPI方式和CAN控制器MCP2510晶片與帶智慧型適配卡的PC機實現CAN通信 。
