
背景
在高壓開關設備中,隔離開關(DS)的使用量是最大的,在高壓電網中起到隔離線路,建立可靠絕緣間隙的作用,DS還用於換接線路以及變換母線接線方式。DS性能的好壞直接影響電網的安全運行,是高壓電網中最重要的設備之一。
高壓隔離開關在分合閘過程中常由於操動機構速度的快或慢而引起拒分、拒合、分合閘不到位以及傳動部件損壞變形等故障,因此,有必要對開關觸頭的運動過程進行控制。以往的高壓隔離開關操動機構採用彈簧、液壓或氣動技術,具有連桿多、結構複雜的缺點,因此,其累計運動公差大、回響緩慢、可控性差,難以實現觸頭的運動控制。
為了能讓開關觸頭在運動過程中具有良好的可控性,提高其分合閘可靠性,減少操作故障,在高壓斷路器電機操動機構的研究基礎上,提出了高壓隔離開關無刷直流電機(BLDCM)操動機構,設計了其調速控制系統。以550kV高壓隔離開觸頭運動過程為研究對象,搭建了以DSP為核心的控制系統,採用電流和速度雙閉環控制策略對觸頭的運動過程進行控制。通過基於DSP的電機操動機構控制系統可實現DS分合閘過程中觸頭運動的調速控制。
BLDCM操動機構可控性
BLDCM三相繞組的電壓平衡方程可表示為
 高壓隔離開關電機操動機構控制系統
高壓隔離開關電機操動機構控制系統定子繞組產生的電磁轉矩方程與運動方程分別為:
 高壓隔離開關電機操動機構控制系統
高壓隔離開關電機操動機構控制系統 高壓隔離開關電機操動機構控制系統
高壓隔離開關電機操動機構控制系統式中:
u、u、u——為定子相繞組電壓;
r——為定子每相電阻;
i、i、i——為定子相繞組電流;
e、e、e——為定子相繞組電動勢;
 高壓隔離開關電機操動機構控制系統
高壓隔離開關電機操動機構控制系統L——為每相繞組的電感;
M——為每相繞組間的互感;
p——為微分運算元;
T——為電磁轉矩;
T——為負載轉矩;
B——為阻尼係數;
J——為轉動慣量;
ω——為電機機械角速度。
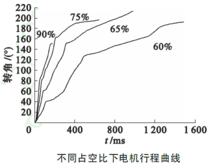
根據其數學模型分析可知,為了能夠對電機運動速度進行控制,進而控制開關觸頭的運動過程,須在兩相繞組的兩端加上可變電壓,採用脈寬調製(PWM)技術來獲得可變電壓。DS觸頭運動的驅動力由BLDCM提供,觸頭運動速度的調整是通過改變PWM 的占空比來實現的。不同的占空比下電機帶動觸頭運動的行程是不同的,如上圖所示,從左至右依次為占空比是90%、75%、65%、60%電機運動的行程曲線。從圖中可以得出,占空比越大,行程曲線的上升斜率越大,即電機轉速越大;隨著占空比的減小,行程曲線斜率變小,即電機轉速變小。
通過實時改變PWM 的占空比可以實現對電機轉速的控制,進而實現對開關觸頭運動過程的控制,使觸頭運動能夠在特定的行程點達到特定的速度要求。
DS電機操動機構及調速控制系統
 高壓隔離開關電機操動機構控制系統
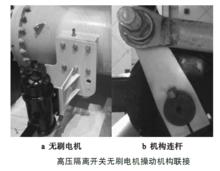
高壓隔離開關電機操動機構控制系統1、BLDCM 操動機構
右圖為550kV配電機操動機構的隔離開關實物圖。DS電機操動機構是一台配有限位器的BLDCM,它通過拐臂直接驅動DS傳動主軸,帶動開關觸頭實現分合操作,克服了以往的高壓隔離開關操動機構採用彈簧、液壓或氣動技術,具有的連桿多、結構複雜等缺點.
2、DS電機機構控制系統
 高壓隔離開關電機操動機構控制系統
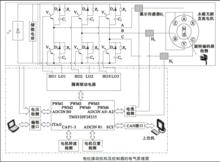
高壓隔離開關電機操動機構控制系統控制系統選用DSP作為控制模組核心來完成整個系統的功能。該系統還包括分合閘隔離驅動控制電路、電機位置檢測電路、速度檢測電路、繞組線圈電流檢測電路以及電容充放電控制電路等。電動機操動機構及控制器的電氣原理圖如圖所示。
1)分合閘隔離驅動控制電路設計。採用功率開關器件IGBT來控制三相繞組電流的通斷,並設定RCD緩衝電路改變器件的開關軌跡控制各種瞬態過壓,降低器件開關損耗,保護器件安全運行。如圖3所示,在IGBT關斷過程中,電容C通過二極體充電,吸收關斷過程產生的du/dt,在IGBT開通後,通過電阻R放電。吸收二極體必須選用快速恢復二極體,其額定電流應不小於主電路器件額定電流的1/10。此外,應儘量減小線路電感,應選用內部電感儘量小且高頻特性好的吸收電容。
2)電機位置檢測電路設計。位置檢測電路起著測量轉子磁極相對位置的作用,為邏輯開關電路提供正確的換相信息,然後控制定子繞組換相。本控制系統採用三個鎖存型霍爾元件按一定角度固定在霍爾盤上作為電機位置檢測感測器。霍爾盤固定在電機外殼上,製作一個圓形磁鋼模擬電機內部磁場分布,磁鋼固定在電機主軸上。當電機運動時帶動磁鋼旋轉,霍爾元件輸出電平發生變化,DSP通過捕獲霍爾元件輸出信號獲取電機轉子所處位置。
3)速度檢測電路設計。採用光電旋轉編碼器去檢測轉子的速度,光電旋轉編碼器由固定在定子上的光電耦合開關和固定在轉子軸上的遮光碟所組成。光電耦合開關沿圓周均勻分布,每隻光耦合開關由相互對著的紅外發光二極體和光敏三極體組成。遮光碟位於發光二極體和光敏三極體中間,盤上開有一定角度的視窗。紅外發光二極體通電後發出紅外光,當遮光碟隨電機轉子一同旋轉時,紅外光間斷地照在光敏三極體上,使其不斷導通和截止,其輸出信號反映了轉子的速度。
4)繞組線圈電流檢測電路設計。傳統的電流檢測電路多利用分壓電阻的方式,此種方法簡單,但電阻會因為溫漂而發生變化,無法保證測量的精度。同時外部電路與控制電路之間沒有電氣隔離,極易造成主迴路中的較高電壓對控制迴路的衝擊,對控制系統的安全構成威脅。因此在電流測量電路中,採用可實現電氣隔離的霍爾型電流感測器CHF-400B,感測器輸出電壓與輸入電流成比例,比值為1/100。電機在正常運行過程中每相繞組中的電流是交變的,但是A/D模組的輸入電壓範圍是0~3.3V,所以在感測器輸出信號前應先通過加法器,再經過比例運算電路以保證線圈電流信號的安全性。
5)電容充放電控制電路設計。BLDCM 採用儲能電容代替傳統的彈簧等儲能方式。在控制系統中設計了電容的充放電控制迴路,當控制器上電後,首先對電容器組進行充電,由DSP採集電容電壓的信號並進行處理,當電壓值達到系統操作要求時,DSP發出停止充電指令,切斷外界電源。
控制策略
 高壓隔離開關電機操動機構控制系統
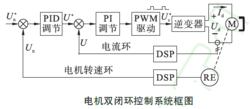
高壓隔離開關電機操動機構控制系統設計的控制系統採用雙閉環控制,內環為電流環,外環為速度環,內外環均採用PID控制算法,系統控制框圖如圖所示。
在DS觸頭運動過程中,電機側參考速度值與電機實際測量到的信號比較得到誤差信號。誤差信號經過PID控制器,進行外環的速度調節,速度環的輸出信號作為電流PID控制器輸入信號,電流環的輸出信號給IGBT模組提供脈衝觸發信號,通過調整PWM 的占空比來實現對電機速度的控制。
結論
對DS操動機構電機控制系統進行搭建並做了大量的試驗,可以得到以下結論:
1)結合對BLDCM數學模型分析,提出並研究了DS電機操動機構控制技術。該操動系統將高壓電器技術和電機控制系統相關理論及套用技術結合,克服了傳統DS機構操動過程的不可控.經過運行、調試,結果證明了該方案的可行性。
2)通過調速控制系統,能夠使DS觸頭在特定行程段達到特定的速度以滿足550kVDS技術指標要求。
3)BLDCM操動機構不僅能提供基本的DS驅動功能,更能夠實現DS操動過程的智慧型化操作,為高壓隔離開關操動機構提供了更先進的套用平台新技術。
