
非對稱流動現象
由於非對稱流動只出現在旋成體繞流攻角較大的情況,這促使人們需首先認清非對稱流場與來流攻角之間的關係。經過多年的研究,現在一般認為隨攻角從0度到90度變化流場可分為四種繞流形態:當攻角較小,在0度~15度之間時,流場呈定常附著對稱流動狀態,旋成體無明顯側向力;當攻角在15度到30度之間時,旋成體兩側有不對稱分離渦捲起,仍為定常流動,但旋成體有明顯的側向力出現;攻角增大到30度到65度之間時,分離背渦非對稱特性顯著,流動介於定常與非定常之間;當攻角很大時,大於65度時,流場進入非定常流動狀態,發生類似二維卡門渦街或隨機尾跡的脫落現象。
攻角在50度~60度附近時非對稱背渦誘導出的側向力最大,因此這一攻角範圍成為旋成體非對稱繞流研究的重點區間,對該區間背渦空間結構的認識一直是人們關注的重點。五十年代末,Hall等人通過對實驗獲得的紋影照片觀察,並結合脈衝起動流比擬的思想,提出旋成體背風流場按渦結構沿軸向可分為位流、對稱渦、非對稱渦和非定常渦脫落等區域。九十年代,Zilliac與Degani通過流動顯示技術將非對稱流場分為三個區域,即離頭部較近的定常強非對稱區,離頭部較遠的弱非對稱區,以及旋成體下游流場的類二維圓柱繞流區域,該分區思想能很好地解釋側向力沿旋成體軸向類正弦形式衰減的分布特徵。近來,鄧學鎣等人通過水洞顯示實驗及表面測壓實驗給出了非對稱背渦的空間演化規律,並將背風流場沿旋成體軸向分為多個渦區,細化了渦系脫落與側向力變化之間的對應關係。以上背渦空間結構的研究成果促進了人們對非對稱流動現象的認識。
簡介
現代先進飛行器往往具有細長前體,大攻角條件下細長前體的背風面會形成非對稱渦結構,從而產生很大的側向力和偏航力矩,嚴重影響飛行器的控制品質和飛行安全。隨著先進飛行器的性能提高,大攻角非對稱流動問題越來越受到重視。但是大攻角非對稱流動的高度複雜性使該研究非常困難,到目前為止還沒有從機理上把握大攻角非對稱流動產生原因;對大攻角非對稱流動的研究滯後于飛行器的研製需求,目前只能在地面常規風洞中進行飛行武器的氣動性能預估。但是在實際飛行過程當中,很多先進飛行器比如F-15等都遇到過風洞試驗中沒有預測到的大攻角橫向偏離問題,這種橫向偏離不僅有著突發性,且同一構型不同架次飛機的大攻角橫側特性存在很大差異。這些現象對於準確預估飛行器大攻角性能產生了較大的影響,由於地面風洞中模型尺度很小,與真實飛機實際飛行相比,雷諾數相差巨大,因此雷諾數對於大攻角非對稱流動的影響研究非常必要。
形成原因
對非對稱背渦形成的原因,學術界一直以來都存有爭論,主要存在著兩種不同的看法:一是旋成體背渦的空間動力不穩定性;另一是旋成體兩側邊界層由於轉挨不對稱而引起的分離不對稱。目前,人們普遍認為旋成體頭部區域擾動對非對稱流場的形成有重大影響。
非對稱渦控制
九十年代以來,由於對第四代戰鬥機大攻角機動能力和過失速機動能力的迫切需要,人們對抑制和控制旋成體大攻角繞流出現的非對稱流動現象做了大量的研究工作,Malcolm與Williams對這方面的工作做了很好的回顧。
旋成體橫側向控制方法可以分為多種類型。一種是通過抑制或降低分離背渦的非對稱程度,達到減小或消除旋成體側向力的目的。另一種是通過控制背渦的非對稱狀態以獲得希望的旋成體側向力及偏航力矩水平。
第一種控制思想有多種實現方式,如在細長體尖拱頭部貼上人工轉捩條、頂部設定固定擾動塊或改變模型外型等方法。增大頭部鈍度是一種較簡單常見的方法,Kumar R詳細研究了頭部鈍度對圓錐體大攻角繞流時的側向力影響情況,結果表明在相同攻角下頭部較鈍錐體的側向力水平較低。Malcolm[52]通過在旋成體側面布置不同形式的邊條以延遲邊界層分離或固定邊界層分離位置,也可達到減小或消除背渦非對稱性的目的。國內顧蘊松等人利用在模型頭部設定往復振盪的微小擾動片也能達到減小旋成體側向力的目的。以上方法均屬於第一種控制思想,然而這種控制思想存在著很多局限性,例如對飛行器頭部進行鈍化會影響飛行器高速飛行時減小波阻的能力,且一般的控制手段也不能夠完全消除背渦的非對稱性,而只是達到減弱的目的。
Levy等人使用數值模擬方法研究頭部擾動時,發現隨著幾何擾動塊高度的增加,旋成體背渦流場的不對稱程度也逐漸增大,並最終達到最大狀態,這一規律表明人工擾動強度的改變與流場非對稱性之間存在確定對應的關係,這為上面第二種控制思想的實現提供了有力的依據。
第二種控制思想通過有目的地控制背渦的非對稱狀態,獲得所希望的側向力水平,是一種更加積極的控制思想。這類控制方法通常是在模型尖拱頭部設定幾何擾動塊、吹氣孔等擾動,通過調整擾動強度以實現對整體非對稱流場的控制。由於幾何擾動塊的位置和大小不易改變,因而難以套用於工程實踐中,吹氣方法則由於可連續調節擾動強度而被人們廣泛採用。目前較為流行的吹氣控制方法有
Bernhardt等人的不定常微吹吸氣控制技術和Roos的定常微吹氣控制技術。Bernhardt通過調整布置在模型頭部背風側正負135度的兩個吹氣孔的吹吸氣強度,對旋成體側向力進行比例控制,然而在雙穩態流場下該方法容易引起流場流型突變及旋成體側向力階躍的問題,導致控制變得困難。Roos採用的方法與Bernhardt相似,在旋成體模型頭部施加微吹氣擾動控制背渦的非對稱性,當該方法套用到F-15飛機模型時取得了一定的控制效果,然而該控制方法在雙穩態流場下同樣遇到了側向力階躍的問題,Roos提出增大模型頭部鈍度或減小繞流攻角的辦法以解決這一問題,但這樣卻減小了吹氣擾動的控制容量。
鄧學鎣在研究吹氣擾動控制非對稱背渦時,引入吹氣控制容量和控制靈敏度兩個概念,用以表征某一吹氣孔位下側向力對吹氣動量係數變化的反應能力。吹氣控制容量指吹氣流量範圍內所能控制的最大側向力變化範圍,由於非對稱背渦只在雙穩態的兩正則態之間變化,側向力變化範圍受此限制,吹氣控制容量存在最大值。吹氣控制靈敏度指單位吹氣量改變引起的側向力增量,靈敏度高的控制方法在單位吹氣變化量下引起的側向力增量較大,即可以用小的吹氣變化量獲得大的側向力改變,控制靈敏度低則在單位吹氣變化量下引起的側向力增量較小,但控制靈敏度低時吹氣增量範圍增加,更便於對側向力進行精確控制。
 非對稱渦
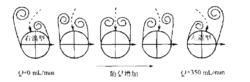
非對稱渦為了滿足以上兩個控制性能指標,鄧學鎣等提出了單孔位微吹氣技術,該技術主要利用了兩個吹氣擾動控制規律:一是吹氣擾動總是將與其同側的低位渦吹向高位渦以實現流動控制(如圖);二是流場對適當靠近模型迎風對稱面的吹氣擾動較不敏感,位於這一區域的吹氣擾動控制靈敏度較低。實驗結果顯示單孔位微吹氣技術具有控制容量大、控制靈敏度低等優點,能很好地實現雙穩態流場的平緩漸變控制。但由於單孔位吹氣控制技術在實施控制前流場處於自然擾動主控,流型結構不能確定,使得不便於事前確定有效吹氣孔位,導致該技術的進一步套用受到限制。
