
計算方法
設系統框圖如圖1所示,分析靜態誤差與系統傳遞函式的關係,並且為方便起見,採用圖中的e(t)作為誤差。
 圖1
圖1容易求得,從輸入信號到誤差信號的傳遞函式為
 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數式中是閉環系統的開環傳遞函式。
如果e(t)是有終值的,根據拉普拉斯變換的終值定理有
 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數可以看出,對於給定的輸入量關於輸入量的靜態誤差只取決於系統的開環傳遞函式。
當輸人信號為三種典型信號之一時,上式化為
 靜態誤差係數
靜態誤差係數對於單位階躍函式
 靜態誤差係數
靜態誤差係數對於單位斜坡函式
 靜態誤差係數
靜態誤差係數對於單位加速度函式
定義靜態誤差係數如下:
 靜態誤差係數
靜態誤差係數位置誤差係數:
 靜態誤差係數
靜態誤差係數速度誤差係數:
 靜態誤差係數
靜態誤差係數加速度誤差係數:
把式(4)、(5)、(6)分別代人式(1)、(2)、(3)中,得
 靜態誤差係數
靜態誤差係數對於單位階躍函式:
 靜態誤差係數
靜態誤差係數對於單位斜坡函式:
 靜態誤差係數
靜態誤差係數對於單位加速度函式:
 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數通常有,於是式(7)化為,與另外兩個公式形式上相似。這表明:採用靜態誤差係數概念後可以認為,系統在三種典型輸入信號作用下的 靜 態誤差等於或近似等於相應的誤差係數的倒數。
相互關係
與系統的結構和參數的關係
下面進一步考察靜態誤差係數與系統的結構和參數的關係。
將系統的開環傳遞函式一般地寫成
 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數
靜態誤差係數的形式,式中K是系統的開環比例係數;各和各都可以是實數或共軛複數分母中的因子表明開環傳遞函式中含有個積分單元,工程上按照v的值分別稱系統為0型,1型,2型,的系統實際上極少遇到,因為 含有多於兩個積分單元的系統很難使之穩定,因此一般情形下只使用0型,1型和2型的系統。
把式(10)代人靜態誤差係數的定義式(4)、(5)、(6)中得
 靜態誤差係數 靜態誤差係數 靜態誤差係數 靜態誤差係數
靜態誤差係數 靜態誤差係數 靜態誤差係數 靜態誤差係數從上式分別求出各型系統的靜態誤差係數,列於表1;再從式(7)、(8)、(9)分別求出靜態誤差,列於表2。從這兩個表可以看出:首先,就同一典型輸入信號而言,積分單元數目愈多的系統,靜態誤差愈小;而就同一系統而言,輸入信號變化率愈大,靜態誤差愈大。其次,不含積分單元的0型系統在階躍輸入信號下必有靜差,所以稱作 有靜差系統,對於有靜差系統,只要在保證系統穩定的前提下提高系統的開環比例係數,就可以減小靜差,至於含有積分單元的1型和2型系統,它們在階躍輸入信號作用下沒有靜差,稱作 無靜差系統,有個積分單元就稱為階的無靜差系統,或說系統的 無靜差度是。
| 系統類型 | 位置誤差係數  靜態誤差係數 靜態誤差係數 | 速度誤差係數  靜態誤差係數 靜態誤差係數 | 加速度誤差係數  靜態誤差係數 靜態誤差係數 |
| 0型( 靜態誤差係數 | K | 0 | 0 |
| 1型( 靜態誤差係數 |  靜態誤差係數 靜態誤差係數 | K | 0 |
| 2型( 靜態誤差係數 | 靜態誤差係數 | 靜態誤差係數 | K |
| 系統類型 | 單位階躍函式輸入 | 單位斜坡函式輸人 | 單位加速度函式輸入 |
| 0型( 靜態誤差係數 |  靜態誤差係數 靜態誤差係數 | 靜態誤差係數 | 靜態誤差係數 |
| 1型( 靜態誤差係數 | 0 |  靜態誤差係數 靜態誤差係數 | 靜態誤差係數 |
| 2型( 靜態誤差係數 | 0 | 0 | 靜態誤差係數 |
顯然,用0型系統跟蹤恆速變化的信號時,它的輸出量的速度總是趕不上輸入信號的速度,以致差距愈來愈大,1型系統則能以同樣速度跟蹤恆速變化的信號,但有一定的靜差,以致輸出量總比輸入信號“落後”一個固定的量,輸入信號變化的速度愈大,落後的量也愈大,圖2表示單位反饋的1型系統對斜坡輸入信號的回響。
靜態誤差係數從表2還可以看出,0型和1型系統都不能跟蹤恆加速度信號,而2型系統能跟蹤恆加速度信號,但有靜態誤差,換句話說,它的輸出量能與輸入信號以同一加速度和同一速度變化,但總是“落後”一個固定的量。圖3表示單位反饋的2型系統對恆加速度輸入信號的回響。
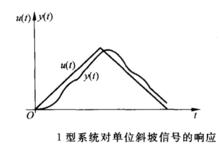 圖2
圖2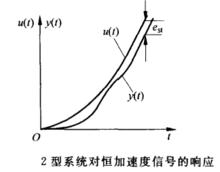 圖3
圖3綜上所述,在保證系統穩定的前提下,如果系統的前向通道中積分單元數目愈多,則愈可以提高系統的無靜差度,例如在0型系統的主通道中增加一個積分單元,就變成1型系統,對階躍輸入信號就由原來的有靜差變成無靜差。另外,增大系統的開環比例係數可以減小靜態誤差,這為選擇系統的開環比例係數提供了依據。例如,要求某0型系統的靜態誤差不超過1%,則至少應選K為99;如果要求1型系統在信號變化速度為1°/s時的靜態跟蹤誤差不超過1',則至少應選K為60s 。
