
矢量控制
交流電機調速系統的矢量變換控制技術是世紀年代開始迅速發展起來的一種新型控制思想。它通過將定子電流分解成相互獨立的勵磁電流和轉矩電流,從而使交流電動機在很大程度上類似於直流電動機,大大簡化了控制的難度,並獲得了較好的控制效果。使得這種控制方法成為交流電機獲得理想調速性能的重要途徑。控制系統的主要模組有速度調節模組,矢量變換模組,磁場定向角計算模組,電機模組等組成。
發展背景
在直接矢量控制系統中,系統不僅複雜,控制效果也不是很好。在這種情況下,日本人就提出了一種間接矢量控制方法。這種控制方法比較簡單,不需要進行磁通檢測,而像通常的轉差控制方法一樣,只要測出電動機轉子的角頻率,加上根據需要的轉矩推算出應有的轉差角頻率,以此控制定子電流的瞬時角頻率,就能使電動機的電流和轉矩迅速由原先的工作狀態變到新的所需的工作狀態。
間接矢量控制
如果在控制過程中,只要能使電機定子、轉子或氣隙磁場中有一個始終保持不變,電機的轉矩就能和穩態工作時一樣,主要由轉羞決定。按照這個想法,就可以從轉子磁通直接得到定子電流軸分量的給定值,在通過對定子電流的有效控制,就形成了轉差矢量控制,避免了磁通的閉環控制。這種控制方法也稱間接矢量控制,不需要實際計算轉子磁鏈的幅值和相位,用轉差頻率和測量的轉速相加後積分來估計磁通相對於定子的位置,結構比較簡單,所能獲得的動態性能基本上可以達到直流雙閉環控制系統的水平。
原理
下圖為用於矢量控制的向量圖。
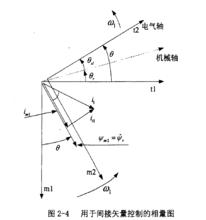 間接矢量控制
間接矢量控制根據旋轉坐標系M2-T2的等效電路,可以寫出下列方程:
 間接矢量控制
間接矢量控制 間接矢量控制
間接矢量控制另外,還有如下方程:
 間接矢量控制
間接矢量控制 間接矢量控制
間接矢量控制對於解耦控制,最好是:
 間接矢量控制
間接矢量控制 間接矢量控制
間接矢量控制 間接矢量控制
間接矢量控制下圖是間接矢量控制的系統結構圖。
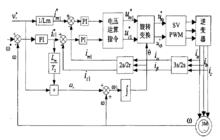 間接矢量控制
間接矢量控制與直流矢量控制對比
間接矢量控制的最主要優點在於不需要安裝複雜的磁通感測器。間接矢量控制現已成為高性能異步電機控制的通用方法。但是間接矢量控制方法的磁通位置角的計算是基於前饋方式,通過電機數學模型的分析來獲得位置角的計算公式,所以其不可避免的依賴電機參數,使其對電機參數的變化非常敏感。事實上,由於轉子時間常數估計的不準確性使定子電流矢量和轉子磁通並不在同一個軸上,而是有一定的偏差,這就不可避免的使定子電流的力矩分量和磁通分量不能完全解禍,影響整個系統的性能。當穩態的磁通幅值跟參考幅值存在一定偏差的時候,就會出現力矩的遲滯回響,這會導致在磁場增加的時候磁場飽和或在磁場幅值減小時力矩減小。因此,在高精度的場合,為了精確的估計轉子時間常數,在間接矢量控制第一次啟動時,一個長而準確的過程是必須的。而且,一般電機轉子電阻隨時間的變化較大,為了保持系統良好的動態性能,必須進行轉子時間常數補償。為了辨識轉子時間常數,人們發明了各種各樣的方法,典型的有波形估計的卡爾曼濾波算法,基於狀態觀測的各種狀態觀測器,基於自適應理論的模型參考自適應等。過去,由於計算機硬體的限制,很多巧妙的方法由於存在複雜的算法難以實現,但隨著高速處理器,特別是晶片的廣泛使用,很多算法得以實現,進一步加強了轉子時間常數辨識方法的進一步研究。
直接矢量控制方法是基於對磁通實際位置的檢測,由於採用磁通感測器比較昂貴,往往直接矢量控制設備比間接矢量控制昂貴許多,而且,由於考慮使用磁通感測器,如互感線圈或霍爾感測器後,必須對電機內部結構進行改造,進一步增加了系統的成本。
電機參數對間接矢量控制的影響
溫度變化因數
在間接矢量控制中當電機轉子電阻發生變化時,轉子電阻實際值與控制器的估計值不一致時,將對間接矢量控制的關鍵參數轉差頻率的計算產生誤差,從而不能準確算出轉子磁鏈的位置,使整個系統不能完全解禍,影響對電機電磁轉矩的控制,從而使整個控制系統性能惡化,因此,在實際運行中必須考慮溫度補償策略。
頻率變化因數
在矢量控制時,電機的調速是通過改變頻率來實現的,為了改善異步電機的起動特性,轉子往往會採用一些特殊的槽型。由於集膚效應,隨著轉子頻率與電流量的分布變化,使轉子參數也會發生變化,實驗證明,轉子槽深越大,隨著頻率的增大,其電阻將大幅度增大,而電抗大幅度減小,因此,等效電路參數從短路實驗測得的電感必須考慮集膚效應。要想獲得精確測量,應把測量頻率降低到實際運行時的頻率下進行。
磁路飽和因數
勵磁電抗是由氣隙長度與鐵心磁路飽和程度來決定,在一定的輸出範圍,當主磁通減少,磁路的飽和程度降低時,勵磁電抗將會增大,除此之外,轉子電阻與轉子漏抗也會受磁路飽和程度的影響,當負載電流流過轉子導體,轉子鐵心發生磁路飽和時,由於漏磁通的作用同樣會產生集膚效應,使轉子電阻增大,漏抗下降。
雜散損耗因數
要達到高精度控制,雜散損耗也不能忽略,一般雜散損耗約為額定輸出的0.5%,但是當過載150%運行時,雜散損耗將上升為額定輸出的10%,這時就必須考慮修正,而這是利用電機等效電路要研究的一個新課題。
