
間接矢量控制
如果在控制過程中,只要能使電機定子、轉子或氣隙磁場中有一個始終保持不變,電機的轉矩就能和穩態工作時一樣,主要由轉差決定。按照這個想法,就可以從轉子磁通直接得到定子電流軸分量的給定值,在通過對定子電流的有效控制,就形成了轉差矢量控制,避免了磁通的閉環控制。這種控制方法也稱間接矢量控制,不需要實際計算轉子磁鏈的幅值和相位,用轉差頻率和測量的轉速相加後積分來估計磁通相對於定子的位置,結構比較簡單,所能獲得的動態性能基本上可以達到直流雙閉環控制系統的水平。
間接矢量控制系統
間接矢量控制系統是以間接矢量控制為主要控制策略的工作系統,間接矢量控制系統穩定,轉速可調且跟蹤能力較強,系統無超調,啟動快,過渡過程較短。總體上看,間接矢量控制系統靜、動態性能較優良,系統結構簡單,不需要進行轉子磁鏈的測量,降低了系統對轉子參數的依賴性,避免了因觀測不準確而引起的誤差。系統具有基於穩態模型轉差頻率控制系統的優點,同時用基於動態模型的矢量控制規律克服了它的大部分不足之處。
系統結構
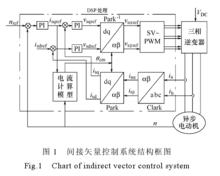
下圖為間接矢量控制系統結構框圖。它具有速度反饋和電流反饋,採用空間矢量脈寬調(SVPWM)策略。間接矢量控制的速度調節器、電流解耦、轉子磁場定向、電流調節器以及SVPWM都是通過數位訊號處理器(DSP)實現的,即實現了全數字處理。
磁鏈閉環控制的矢量控制系統中,轉子磁鏈反饋信號是由磁鏈模型獲得的,其幅值和相位都受到電機參數Tr和Lm變化的影響,造成控制的不準確性。既然這樣,與其採用磁鏈閉環控制而反饋不準,不如採用磁鏈開環控制,系統反而會簡單一些。在這種情況下,可利用矢量控制方程中的轉差公式,構成轉差型的磁鏈開環矢量控制系統——間接矢量控制系統。它繼承了基於穩態型轉差頻率控制系統的優點,又利用基於動態模型的矢量控制規律克服了它大部分的不足之處。
 間接矢量控制系統
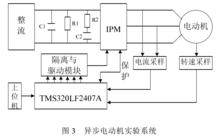
間接矢量控制系統以異步電動機間接矢量控制系統為實例介紹間接矢量控制系統的組成。它主要由控制與運行模組、功率變換模組、檢測採樣模組三個部分組成。
 間接矢量控制系統
間接矢量控制系統功率變換電路
IPM 內部封裝了 6 只IGBT 及其驅動電路,需4 組獨立的電源供電;包含了性能優良的內置保護電路,保護功率器件,主要有欠壓鎖定、過熱保護、過流保護、短路保護等,只要任一種保護電路動作,都會封鎖 PWM 脈衝。
電流和轉速採樣電路
電流採樣電路用來將感測器檢測的電流轉換成二進制代碼,本實驗平台選擇霍爾感測器,精度較高,可檢測任意波形的電流。轉速檢測電路採用每轉1024個脈衝的增量式光電編碼器。輸出的兩路正脈衝信號經電平轉換後接到DSP的編碼器接口QEP1和QEP2;利用DSP信號處理電路得到4倍頻信號,即每轉4096個脈衝,解析度提高。同時計算電動機的轉速。
控制與運行模組
採用TI公司的16位DSP晶片TMS320LF2407A作為系統的控制核心,負責電流和轉速的採用和處理,並套用間接矢量控制算法得到PWM控制信號,經過功率放大和光電隔離,驅動IPM內的器件;當系統出現短路、過流、過壓和過熱等故障時,封鎖PWM信號。
優點
交流電機高性能調速系統中,間接矢量控制系統控制方法比較簡單,不需要進行磁通檢測,而像通常的轉差控制方法一樣,只要測出電動機轉子頻率,加上根據需要的轉矩推算出應有的轉差頻率,以此控制定子電流的瞬時頻率,就能使電動機的電流和轉矩迅速由原先的工作狀態變到新的所需工作狀態。
